Billar diferenciable#
![]()
Veamos una idea central de la física diferenciable con PyTorch: en lugar de aprender parámetros de una red, optimizamos las condiciones iniciales de un sistema físico.
El objetivo será elegir:
la posición inicial de la bola blanca,
su velocidad inicial,
de modo que, después de muchas colisiones, una bola objetivo termine lo más cerca posible de un punto marcado sobre la mesa.
El problema de optimización#
Planteamos el problema de optimización en función de una función de costo que mide que tan lejos queda la bola objetivo del punto deseado. Para esto, tenemos que tener un simulador que realiza la dinámica hacia adelante, que actualiza posiciones y velocidades de las distintas bolas de billar a medida que pasa el tiempo. Esta evolución temporal dependerá de la posición inicial \(x_0\) \(de la bola blanca, y de su vector velocidad \)v_0$.
En símbolos:
Construiremos a toda la simulación con operaciones de torch, de modo tal que PyTorch podrá calcular los gradientes de nuestra función de costo \(L\) respecto de \(x_0\) y \(v_0\).
import math
import time
import matplotlib.pyplot as plt
from matplotlib.patches import Circle
import torch
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
real = torch.float32
plt.rcParams["figure.figsize"] = (5, 5)
plt.rcParams["axes.titlesize"] = 12
print("dispositivo:", device)
dispositivo: cpu
Planteo de la geometría de la escena#
Trabajamos en una mesa cuadrada normalizada al rango \([0, 1] \times [0, 1]\).
La bola blanca será la bola
0.El resto de las bolas arrancan en una formación triangular.
La última bola de esa formación será la bola objetivo.
El punto negro marca la posición final deseada.
steps = 1024 # pasos a simular
dt = 0.003 # intervalo de tiempo del paso
radius = 0.03 # de las bolas
elasticity = 0.8 # cuanto pierde la bola al chocar con otra o con la pared (1.0 es sin perdida de energia, 0.0 es sin rebote)
billiard_layers = 3
n_balls = 1 + (1 + billiard_layers) * billiard_layers // 2
target_ball = n_balls - 1
# Punto objetivo al que queremos llevar la bola azul
goal = torch.tensor([0.88, 0.75], device=device, dtype=real)
# donde comienza la bola blanca y con qué velocidad
default_init_x = torch.tensor([0.10, 0.50], device=device, dtype=real)
default_init_v = torch.tensor([0.30, 0.00], device=device, dtype=real)
COLOR_TABLERO = "#3C733F"
COLOR_BOLA_BLANCA = "#DDDDDD"
COLOR_BOLA_OBJETIVO = "#3344CC"
COLOR_BOLA = "#F20530"
COLOR_OBJETIVO = "#000000"
def build_rack():
"""Arma el rack de bolas, posicion inicial"""
rack = []
for i in range(billiard_layers):
for j in range(i + 1):
rack.append([
i * 2 * radius + 0.5,
j * 2 * radius + 0.5 - i * radius * 0.7,
])
return torch.tensor(rack, device=device, dtype=real)
# armamos las posiciones inciales
POSICIONES_RACK = build_rack()
# agrega bola blanca
def build_table_state(cue_pos):
return torch.cat([cue_pos.reshape(1, 2), POSICIONES_RACK], dim=0)
# arma la escena
def render_scene(pos, title=None, ax=None):
if ax is None:
fig, ax = plt.subplots(figsize=(5, 5))
else:
fig = ax.figure
fig.patch.set_facecolor(COLOR_TABLERO)
ax.set_facecolor(COLOR_TABLERO)
ax.set_xlim(0.0, 1.0)
ax.set_ylim(0.0, 1.0)
ax.set_aspect("equal", adjustable="box")
ax.set_xticks([])
ax.set_yticks([])
for spine in ax.spines.values():
spine.set_visible(False)
ax.add_patch(Circle((goal[0].item(), goal[1].item()), radius, color=COLOR_OBJETIVO))
pos_np = pos.detach().cpu().numpy()
for i in range(n_balls):
if i == 0:
color = COLOR_BOLA_BLANCA
elif i == target_ball:
color = COLOR_BOLA_OBJETIVO
else:
color = COLOR_BOLA
ax.add_patch(Circle((pos_np[i, 0], pos_np[i, 1]), radius, color=color))
if title is not None:
ax.set_title(title)
return ax
initial_table = build_table_state(default_init_x)
render_scene(initial_table, title="Configuración inicial")
plt.show()

Dinámica y colisiones#
La simulación usa un esquema explícito muy simple:
predecimos si dos bolas van a superponerse en el próximo paso,
calculamos un impulso correctivo según la velocidad relativa,
actualizamos velocidad y posición.
Esto es un simulador muy idealizado; es una versión compacta, suficiente para estudiar la idea de optimización con gradientes.
def initialize_state(init_x, init_v):
pos = build_table_state(init_x)
vel = torch.cat(
[
init_v.reshape(1, 2),
torch.zeros((n_balls - 1, 2), device=device, dtype=real),
],
dim=0,
)
return pos, vel
def collide(pos, vel):
# calculamos la posicio futura de cada bola
predicted_pos = pos + dt * vel
# calculamos distancia entre cada par de bolas
delta = predicted_pos[:, None, :] - predicted_pos[None, :, :]
dist = torch.linalg.norm(delta, dim=-1)
# calculamos dirección de la colisión
direction = delta / dist.clamp_min(1e-6).unsqueeze(-1)
# calculamos velocidad relativa entre cada par de bolas
relative_velocity = vel[:, None, :] - vel[None, :, :]
# proyectamos sobre la direccion de colision
projected_velocity = (direction * relative_velocity).sum(dim=-1)
# solo consideramos colisiones entre bolas distintas, que estén lo suficientemente cerca, y que se estén acercando
valid_pairs = ~torch.eye(n_balls, device=device, dtype=torch.bool)
colliding = (dist < 2 * radius) & (projected_velocity < 0) & valid_pairs
# calculamos el momento o impulso en cada colision
impulse_pair = (-(1 + elasticity) * 0.5 * projected_velocity).unsqueeze(-1) * direction
impulse_pair = torch.where(colliding.unsqueeze(-1), impulse_pair, torch.zeros_like(impulse_pair))
# para evitar que las bolas se "atraviesen" entre sí, calculamos el tiempo de impacto y corregimos la posición
min_projected_velocity = torch.minimum(projected_velocity, torch.full_like(projected_velocity, -1e-3))
time_of_impact = (dist - 2 * radius) / min_projected_velocity
position_correction = torch.minimum(time_of_impact - dt, torch.zeros_like(time_of_impact)).unsqueeze(-1)
position_correction = position_correction * impulse_pair
# sumamos los impulsos de todas las colisiones para cada bola, y lo mismo con las correcciones de posición
impulse = impulse_pair.sum(dim=1)
x_inc = position_correction.sum(dim=1)
return impulse, x_inc
def simulate(init_x, init_v, save_history=False):
pos, vel = initialize_state(init_x, init_v)
history = [pos.detach().cpu().clone()] if save_history else None
for _ in range(1, steps):
impulse, x_inc = collide(pos, vel)
vel = vel + impulse
pos = pos + dt * vel + x_inc
if save_history:
history.append(pos.detach().cpu().clone())
loss = ((pos[target_ball] - goal) ** 2).sum()
return loss, pos, history
Primer experimento: tiro inicial sin optimizar#
Antes de optimizar nada, probamos una velocidad horizontal sencilla. Eso nos da una referencia para comparar.
def show_snapshots(history, title, frame_ids):
fig, axes = plt.subplots(1, len(frame_ids), figsize=(4 * len(frame_ids), 4))
if len(frame_ids) == 1:
axes = [axes]
for ax, frame_id in zip(axes, frame_ids):
render_scene(history[frame_id], title=f"paso {frame_id}", ax=ax)
fig.suptitle(title)
plt.tight_layout()
plt.show()
baseline_loss, baseline_final_pos, baseline_history = simulate(default_init_x, default_init_v, save_history=True)
print(f"pérdida inicial: {baseline_loss.item():.6f}")
show_snapshots(baseline_history, "Tiro sin optimizar", [0, 256, 512, 1023])
pérdida inicial: 0.051202

Pruebo con otras condiciones iniciales para ver
baseline_loss, baseline_final_pos, baseline_history = simulate(default_init_x+ torch.tensor([0.0,-0.2]),
default_init_v+ torch.tensor([0.0,0.1]),
save_history=True)
print(f"pérdida inicial: {baseline_loss.item():.6f}")
show_snapshots(baseline_history, "Tiro sin optimizar", [0, 256, 512, 1023])
pérdida inicial: 0.082124

Función objetivo#
Una forma de intuir la dificultad del problema es variar solo el ángulo de la velocidad inicial, manteniendo constante su módulo.
Si la curva tiene muchos valles o zonas planas, optimizar no será trivial.
def scan_angles(num_angles=80, zoom=1.2):
losses = []
angles_deg = []
speed = torch.linalg.norm(default_init_v).item()
for i in range(num_angles):
angle = ((i + 0.5) / num_angles - 0.5) * math.pi * zoom
init_v = torch.tensor(
[speed * math.cos(angle), speed * math.sin(angle)],
device=device,
dtype=real,
)
loss, _, _ = simulate(default_init_x, init_v, save_history=False)
losses.append(loss.item())
angles_deg.append(math.degrees(angle))
best_idx = min(range(len(losses)), key=lambda i: losses[i])
return angles_deg, losses, best_idx
angles_deg, losses, best_idx = scan_angles(num_angles=20, zoom=0.5)
plt.figure(figsize=(7, 3.5))
plt.plot(angles_deg, losses)
plt.scatter([angles_deg[best_idx]], [losses[best_idx]], color="crimson", zorder=3)
plt.xlabel("Ángulo de la velocidad inicial (grados)")
plt.ylabel("Pérdida")
plt.title("Paisaje de la función objetivo")
plt.grid(alpha=0.3)
plt.show()
print(f"mejor ángulo dentro del barrido: {angles_deg[best_idx]:.2f} grados")
print(f"mejor pérdida dentro del barrido: {losses[best_idx]:.6f}")
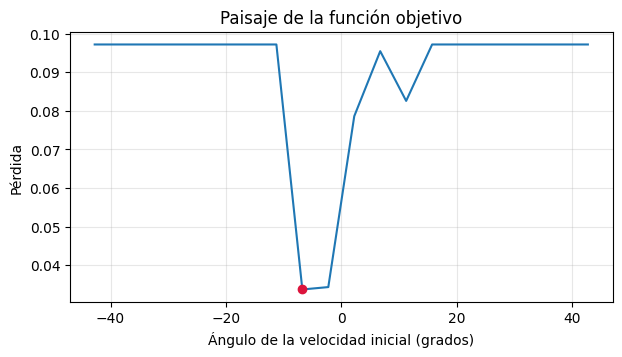
mejor ángulo dentro del barrido: -6.75 grados
mejor pérdida dentro del barrido: 0.033761
default_init_x
tensor([0.1000, 0.5000])
import numpy as np
def scan_x_angles(num_y=60, num_angles=80, y_min=0.02, y_max=0.30, zoom=0.5):
losses = []
angles_deg = []
y_values = []
speed = torch.linalg.norm(default_init_v).item()
x0 = default_init_x[0].item()
for iy in range(num_y):
y = y_min + (iy + 0.5) * (y_max - y_min) / num_y
row_losses = []
for ia in range(num_angles):
angle = ((ia + 0.5) / num_angles - 0.5) * math.pi * zoom
init_x = torch.tensor([x0, y], device=device, dtype=real)
init_v = torch.tensor(
[speed * math.cos(angle), speed * math.sin(angle)],
device=device,
dtype=real,
)
loss, _, _ = simulate(init_x, init_v, save_history=False)
row_losses.append(loss.item())
if iy == 0:
angles_deg.append(math.degrees(angle))
losses.append(row_losses)
y_values.append(y)
losses = np.array(losses) # shape: [num_x, num_angles]
best_flat_idx = np.argmin(losses)
best_y_idx, best_angle_idx = np.unravel_index(best_flat_idx, losses.shape)
return y_values, angles_deg, losses, best_y_idx, best_angle_idx
x_values, angles_deg, losses_2d, best_x_idx, best_angle_idx = scan_x_angles(
num_y=20,
num_angles=20,
y_min=0.3,
y_max=0.7,
zoom=0.5,
)
X, A = np.meshgrid(angles_deg, x_values)
plt.figure(figsize=(8, 5))
contour = plt.contourf(X, A, losses_2d, levels=40, cmap="viridis")
plt.colorbar(contour, label="Pérdida")
plt.scatter(
[angles_deg[best_angle_idx]],
[x_values[best_x_idx]],
color="crimson",
edgecolor="white",
s=80,
zorder=3,
)
plt.xlabel("Ángulo de la velocidad inicial (grados)")
plt.ylabel("Posición inicial y de la bola blanca")
plt.title("Paisaje 2D de la función objetivo")
plt.show()
print(f"mejor y dentro del barrido: {x_values[best_x_idx]:.4f}")
print(f"mejor ángulo dentro del barrido: {angles_deg[best_angle_idx]:.2f} grados")
print(f"mejor pérdida dentro del barrido: {losses_2d[best_x_idx, best_angle_idx]:.6f}")
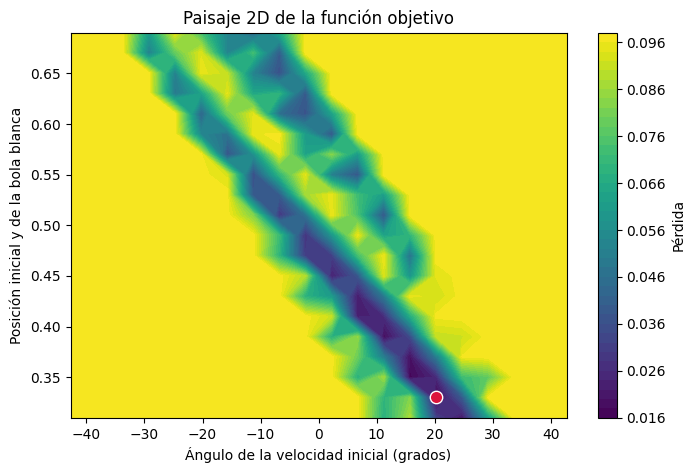
mejor y dentro del barrido: 0.3300
mejor ángulo dentro del barrido: 20.25 grados
mejor pérdida dentro del barrido: 0.016084
y = x_values[best_x_idx]
x = default_init_x[0].item()
init_x1 = torch.tensor([x, y], device=device, dtype=real)
speed = torch.linalg.norm(default_init_v).item()
angle_deg = angles_deg[best_angle_idx]
angle = math.radians(angle_deg)
init_v1 = torch.tensor(
[speed * math.cos(angle), speed * math.sin(angle)],
device=device,
dtype=real,
)
Optimización con gradientes#
Ahora dejamos que torch.autograd calcule derivadas de la pérdida respecto de:
init_x: posición inicial de la bola blanca,init_v: velocidad inicial de la bola blanca.
Usaremos dos etapas:
Adampara explorar el espacio de soluciones,LBFGSpara refinar el resultado final.
def optimize_shot(adam_steps=120, adam_lr=2e-3, lbfgs_lr=0.2, lbfgs_steps=25,
default_init_x=default_init_x,
default_init_v=default_init_v):
init_x = default_init_x.clone().detach().requires_grad_(True)
init_v = default_init_v.clone().detach().requires_grad_(True)
adam = torch.optim.Adam([init_x, init_v], lr=adam_lr)
history = []
for step in range(adam_steps):
adam.zero_grad()
loss, _, _ = simulate(init_x, init_v, save_history=False)
loss.backward()
adam.step()
history.append(loss.item())
if step % 20 == 0 or step == adam_steps - 1:
print(
f"Adam paso {step:03d} | pérdida={loss.item():.6f} | "
f"init_x={init_x.detach().cpu().numpy()} | init_v={init_v.detach().cpu().numpy()}"
)
lbfgs = torch.optim.LBFGS(
[init_x, init_v],
lr=lbfgs_lr,
max_iter=lbfgs_steps,
line_search_fn="strong_wolfe",
)
def closure():
lbfgs.zero_grad()
loss, _, _ = simulate(init_x, init_v, save_history=False)
loss.backward()
return loss
t0 = time.time()
initial_lbfgs_loss = lbfgs.step(closure)
elapsed_ms = (time.time() - t0) * 1000
final_loss, final_pos, _ = simulate(init_x, init_v, save_history=False)
history.append(final_loss.item())
print(f"LBFGS pérdida inicial: {initial_lbfgs_loss.item():.6f}")
print(f"LBFGS pérdida final: {final_loss.item():.6f}")
print(f"Tiempo LBFGS: {elapsed_ms:.2f} ms")
return init_x.detach(), init_v.detach(), history, final_pos.detach()
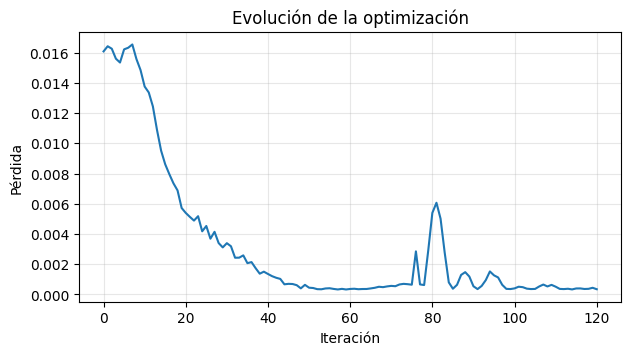
learned_init_x, learned_init_v, optimization_history, learned_final_pos = optimize_shot()
plt.figure(figsize=(7, 3.5))
plt.plot(optimization_history)
plt.xlabel("Iteración")
plt.ylabel("Pérdida")
plt.title("Evolución de la optimización")
plt.grid(alpha=0.3)
plt.show()
print("posición inicial optimizada:", learned_init_x.cpu().numpy())
print("velocidad inicial optimizada:", learned_init_v.cpu().numpy())
Adam paso 000 | pérdida=0.051202 | init_x=[0.102 0.498] | init_v=[ 0.30200002 -0.002 ]
Adam paso 020 | pérdida=0.015339 | init_x=[0.14081442 0.4879632 ] | init_v=[ 0.34048945 -0.01021627]
Adam paso 040 | pérdida=0.006374 | init_x=[0.18060301 0.48288643] | init_v=[ 0.37692216 -0.0096455 ]
Adam paso 060 | pérdida=0.002590 | init_x=[0.21146992 0.48233306] | init_v=[ 0.40232036 -0.00659075]
Adam paso 080 | pérdida=0.000938 | init_x=[0.23578757 0.47982153] | init_v=[ 0.41975653 -0.00509202]
Adam paso 100 | pérdida=0.000441 | init_x=[0.24868017 0.4782049 ] | init_v=[ 0.42826915 -0.00427042]
Adam paso 119 | pérdida=0.000376 | init_x=[0.25235572 0.47724405] | init_v=[ 0.43072948 -0.0040854 ]
LBFGS pérdida inicial: 0.000377
LBFGS pérdida final: 0.000327
Tiempo LBFGS: 16634.01 ms
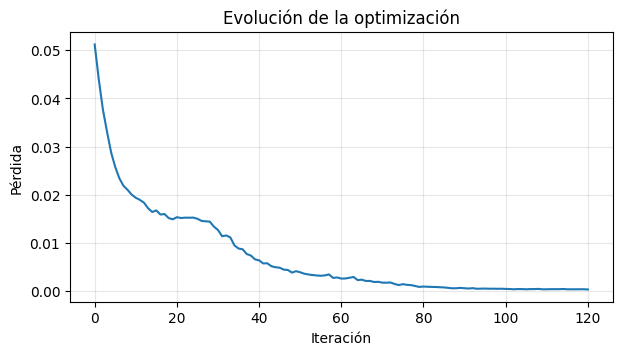
posición inicial optimizada: [0.25049987 0.47677734]
velocidad inicial optimizada: [ 0.42973238 -0.00436945]
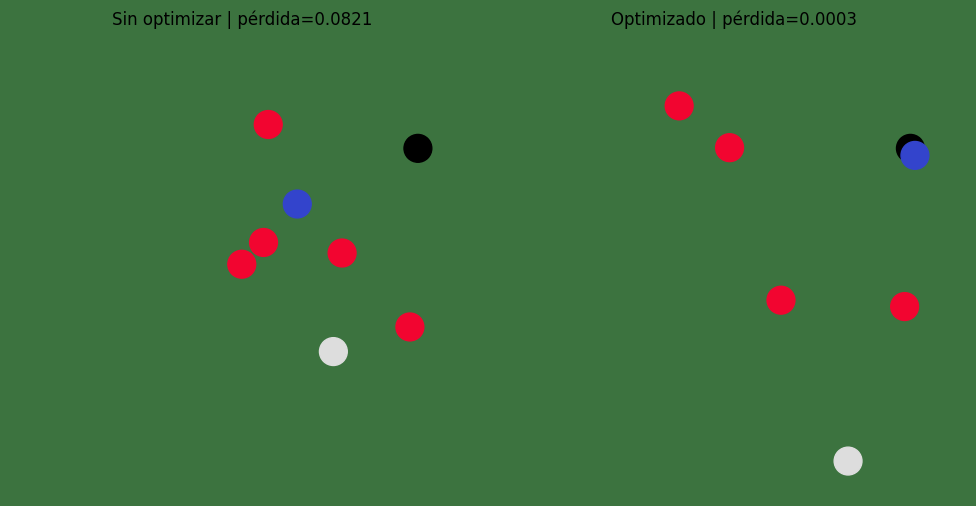
Comparación visual#
Comparamos el disparo inicial con el disparo optimizado. Lo importante no es solo la pérdida numérica, sino cómo una pequeña modificación de las condiciones iniciales cambia toda la cadena de colisiones.
optimized_loss, optimized_final_pos, optimized_history = simulate(learned_init_x, learned_init_v, save_history=True)
fig, axes = plt.subplots(1, 2, figsize=(10, 5))
render_scene(baseline_final_pos, title=f"Sin optimizar | pérdida={baseline_loss.item():.4f}", ax=axes[0])
render_scene(optimized_final_pos, title=f"Optimizado | pérdida={optimized_loss.item():.4f}", ax=axes[1])
plt.tight_layout()
plt.show()
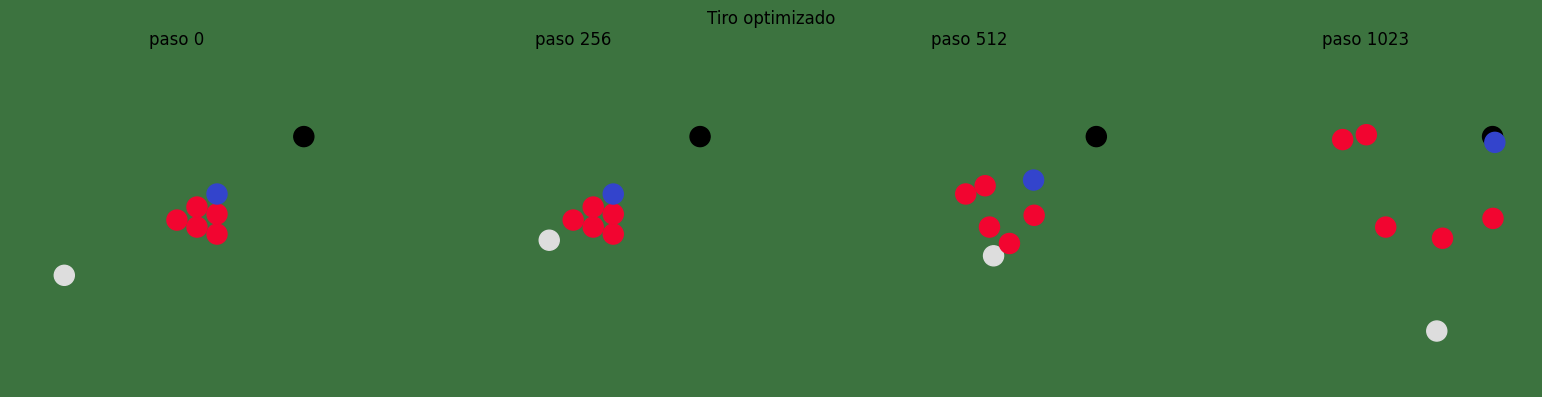
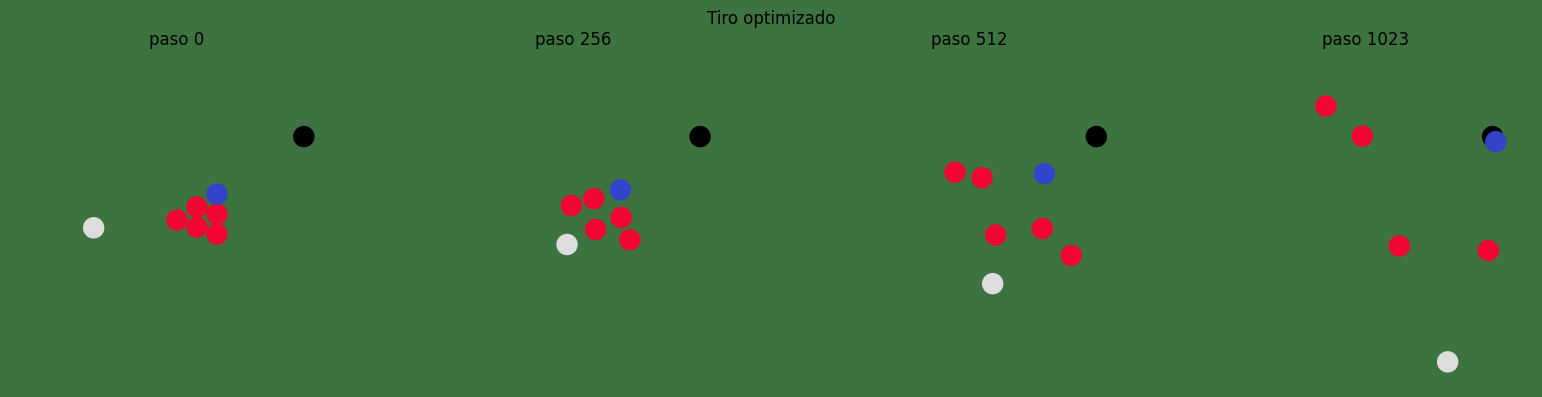
show_snapshots(optimized_history, "Tiro optimizado", [0, 256, 512, 1023])
learned_init_x, learned_init_v, optimization_history, learned_final_pos = optimize_shot(default_init_x=init_x1, default_init_v=init_v1)
plt.figure(figsize=(7, 3.5))
plt.plot(optimization_history)
plt.xlabel("Iteración")
plt.ylabel("Pérdida")
plt.title("Evolución de la optimización")
plt.grid(alpha=0.3)
plt.show()
print("posición inicial optimizada:", learned_init_x.cpu().numpy())
print("velocidad inicial optimizada:", learned_init_v.cpu().numpy())
Adam paso 000 | pérdida=0.016084 | init_x=[0.102 0.33200002] | init_v=[0.28345743 0.10583512]
Adam paso 020 | pérdida=0.005394 | init_x=[0.14215916 0.34695643] | init_v=[0.3230495 0.12738174]
Adam paso 040 | pérdida=0.001355 | init_x=[0.17453717 0.35778317] | init_v=[0.3523669 0.14377782]
Adam paso 060 | pérdida=0.000364 | init_x=[0.18997082 0.3599073 ] | init_v=[0.3652122 0.1497922]
Adam paso 080 | pérdida=0.005399 | init_x=[0.18623516 0.3388869 ] | init_v=[0.36269063 0.13685721]
Adam paso 100 | pérdida=0.000401 | init_x=[0.16951373 0.33796215] | init_v=[0.3509558 0.13857277]
Adam paso 119 | pérdida=0.000441 | init_x=[0.16339909 0.33438316] | init_v=[0.34648514 0.13668703]
LBFGS pérdida inicial: 0.000404
LBFGS pérdida final: 0.000345
Tiempo LBFGS: 15204.37 ms
posición inicial optimizada: [0.16261895 0.33451024]
velocidad inicial optimizada: [0.3458693 0.13687654]
optimized_loss, optimized_final_pos, optimized_history = simulate(learned_init_x, learned_init_v, save_history=True)
show_snapshots(optimized_history, "Tiro optimizado", [0, 256, 512, 1023])