Operadores neuronales: DeepONet, FNO y physics-informed operator learning#
![]()
En esta notebook comparamos tres ideas relacionadas pero distintas:
DeepONet, un operador neural basado en una descomposicion
branch/trunk.FNO (Fourier Neural Operator), que aprende el operador sobre una grilla fija usando capas espectrales.
Physics-informed operator learning, donde combinamos un conjunto supervisado pequeno con un residual fisico de la PDE.
Usaremos un ejemplo exacto y autocontenido. Dado una fuerza 1D
queremos aprender el operador que devuelve la solución del problema de Poisson
Para esta familia, la solución exacta es
Como conocemos la formula cerrada, podemos medir tanto el error in-distribution como la capacidad de extrapolación fuera de la familia de entrenamiento.
import numpy as np
import pandas as pd
import time
import matplotlib.pyplot as plt
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import DataLoader, TensorDataset
torch.set_default_dtype(torch.float32)
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
rng = np.random.default_rng(7)
n_train = 512
n_val = 128
n_grid = 64
x_grid = np.linspace(0.0, 1.0, n_grid, dtype=np.float32)
train_modes = np.arange(1, 4, dtype=np.float32)
output_scale = 25.0
def base_seno(x, modes):
x = np.asarray(x, dtype=np.float32)[..., None]
return np.sin(np.pi * x * modes[None, :]).astype(np.float32)
def coeficientes_muestra(n_samples, modes, low=-1.25, high=1.25):
return rng.uniform(low, high, size=(n_samples, len(modes))).astype(np.float32)
def fuerza_desde_coefs(coeffs, x, modes):
return np.asarray(coeffs, dtype=np.float32) @ base_seno(x, modes).T
def solucion_desde_coefs(coeffs, x, modes):
coeffs = np.asarray(coeffs, dtype=np.float32)
scale = 1.0 / (np.pi * modes) ** 2
return coeffs @ (base_seno(x, modes) * scale).T
def relative_l2(prediction, target):
numerator = np.linalg.norm(prediction - target, axis=1)
denominator = np.linalg.norm(target, axis=1)
return numerator / np.maximum(denominator, 1e-8)
coeff_train = coeficientes_muestra(n_train, train_modes)
coeff_val = coeficientes_muestra(n_val, train_modes)
forcing_train = fuerza_desde_coefs(coeff_train, x_grid, train_modes)
forcing_val = fuerza_desde_coefs(coeff_val, x_grid, train_modes)
solution_train = solucion_desde_coefs(coeff_train, x_grid, train_modes)
solution_val = solucion_desde_coefs(coeff_val, x_grid, train_modes)
x_query = torch.from_numpy(x_grid[:, None]).to(device)
x_grid_t = torch.from_numpy(x_grid).to(device)
print("Using device:", device)
print("forcing_train shape:", forcing_train.shape)
print("solution_train shape:", solution_train.shape)
Using device: cpu
forcing_train shape: (512, 64)
solution_train shape: (512, 64)
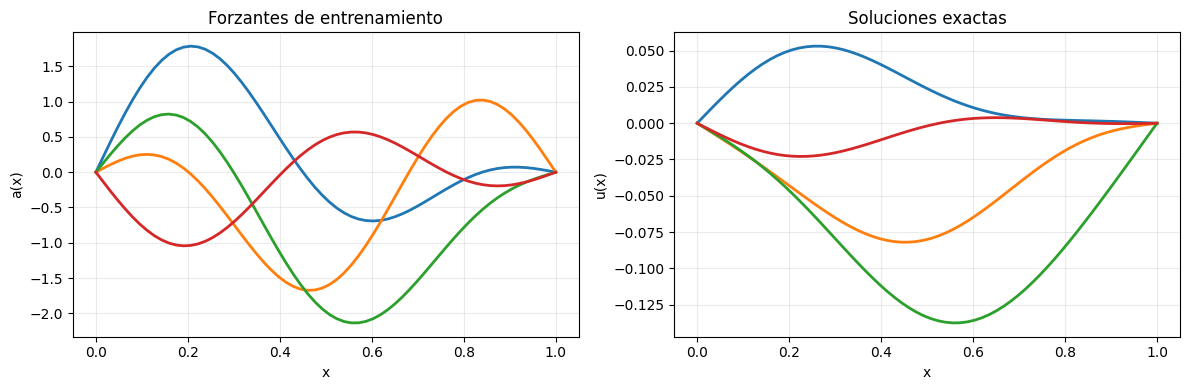
El operador que queremos aprender#
A diferencia de una PINN paramétrica \(u(x, \nu)\), acá la entrada completa es una función \(a(\cdot)\) y la salida también es una función \(u(\cdot)\).
Formalmente queremos aproximar
Trabajaremos siempre con la misma grilla de 64 puntos para poder comparar arquitecturas sobre una base común. Eso favorece a la FNO, que tiene un sesgo inductivo naturalmente ligado a grillas regulares. DeepONet, en cambio, podria evaluar la salida en otros puntos porque su trunk recibe coordenadas continuas.
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
for idx in range(4):
axes[0].plot(x_grid, forcing_train[idx], lw=2)
axes[1].plot(x_grid, solution_train[idx], lw=2)
axes[0].set_title("Forzantes de entrenamiento")
axes[0].set_xlabel("x")
axes[0].set_ylabel("a(x)")
axes[0].grid(alpha=0.25)
axes[1].set_title("Soluciones exactas")
axes[1].set_xlabel("x")
axes[1].set_ylabel("u(x)")
axes[1].grid(alpha=0.25)
plt.tight_layout()
plt.show()
class FeedForward(nn.Module):
def __init__(self, in_shape, out_shape, n_hidden_layers=2, width=64, actfn="tanh"):
super().__init__()
activation_cls = {"tanh": nn.Tanh, "relu": nn.ReLU}[actfn]
layers = []
input_dim = in_shape
for _ in range(n_hidden_layers):
layers.append(nn.Linear(input_dim, width))
layers.append(activation_cls())
input_dim = width
layers.append(nn.Linear(input_dim, out_shape))
self.network = nn.Sequential(*layers)
def forward(self, inputs):
return self.network(inputs)
class DeepONet(nn.Module):
def __init__(self, n_sensors, latent_dim=32, n_hidden_layers=2, width=64):
super().__init__()
self.branch_net = FeedForward(n_sensors, latent_dim, n_hidden_layers, width)
self.trunk_net = FeedForward(1, latent_dim, n_hidden_layers, width)
self.bias = nn.Parameter(torch.zeros(1))
def forward(self, branch_inputs, query_points):
branch_code = self.branch_net(branch_inputs)
trunk_code = self.trunk_net(query_points)
return branch_code @ trunk_code.T + self.bias
class SpectralConv1d(nn.Module):
# Capa convolucional espectral 1D para FNO
def __init__(self, in_channels, out_channels, modes):
super().__init__()
self.modes = modes # Número de modos de Fourier a usar (baja frecuencia)
scale = 1.0 / (in_channels * out_channels)
# Pesos complejos aprendibles para cada modo y canal
self.weights = nn.Parameter(
scale * torch.randn(in_channels, out_channels, modes, dtype=torch.cfloat)
)
def forward(self, inputs):
# 1. Transformada de Fourier real a compleja sobre la última dimensión (espacial)
inputs_ft = torch.fft.rfft(inputs, dim=-1)
# 2. Inicializa el tensor de salida en el espacio de Fourier (todo en cero)
out_ft = torch.zeros(
inputs.shape[0], # batch size
self.weights.shape[1], # out_channels
inputs.size(-1) // 2 + 1, # número de frecuencias positivas
dtype=torch.cfloat,
device=inputs.device,
)
# 3. Multiplica los primeros 'modos' de la entrada por los pesos aprendidos
# (solo se modifican los modos de baja frecuencia)
out_ft[:, :, : self.modes] = torch.einsum(
"bim, iom -> bom", # b: batch, i: in_channel, o: out_channel, m: modo
inputs_ft[:, :, : self.modes], # selecciona solo los primeros modos
self.weights,
)
# 4. Transformada inversa de Fourier para volver al espacio físico
return torch.fft.irfft(out_ft, n=inputs.size(-1), dim=-1)
class FNOBlock1d(nn.Module):
def __init__(self, width, modes):
super().__init__()
self.spectral = SpectralConv1d(width, width, modes)
self.pointwise = nn.Conv1d(width, width, kernel_size=1)
def forward(self, inputs):
return F.gelu(self.spectral(inputs) + self.pointwise(inputs))
class FNO1d(nn.Module):
def __init__(self, modes=8, width=16, n_layers=2):
super().__init__()
self.input_proj = nn.Linear(2, width)
self.blocks = nn.ModuleList([FNOBlock1d(width, modes) for _ in range(n_layers)])
self.output_proj = nn.Sequential(
nn.Linear(width, 32),
nn.GELU(),
nn.Linear(32, 1),
)
def forward(self, forcing_values, x_grid_values):
if x_grid_values.ndim == 1:
x_grid_values = x_grid_values.unsqueeze(0).expand(forcing_values.size(0), -1)
inputs = torch.stack([forcing_values, x_grid_values], dim=-1)
hidden = self.input_proj(inputs).permute(0, 2, 1)
for block in self.blocks:
hidden = block(hidden)
hidden = hidden.permute(0, 2, 1)
return self.output_proj(hidden).squeeze(-1)
def describe_model(model):
total_params = sum(parameter.numel() for parameter in model.parameters())
print(model)
print(f"Total parameters: {total_params}")
def evaluate_deeponet(model, forcing_values):
model.eval()
with torch.no_grad():
forcing_t = torch.as_tensor(forcing_values, dtype=torch.get_default_dtype(), device=device)
prediction = model(forcing_t, x_query) / output_scale
return prediction.cpu().numpy()
def evaluate_fno(model, forcing_values):
model.eval()
with torch.no_grad():
forcing_t = torch.as_tensor(forcing_values, dtype=torch.get_default_dtype(), device=device)
prediction = model(forcing_t, x_grid_t)
return prediction.cpu().numpy()
def trunk_with_second_derivative(trunk_net, query_points):
trunk_code = trunk_net(query_points)
trunk_xx = []
for k in range(trunk_code.shape[1]):
first = torch.autograd.grad(
trunk_code[:, k].sum(),
query_points,
create_graph=True,
retain_graph=True,
)[0]
second = torch.autograd.grad(
first.sum(),
query_points,
create_graph=True,
retain_graph=True,
)[0]
trunk_xx.append(second.squeeze(-1))
return trunk_code, torch.stack(trunk_xx, dim=1)
DeepONet#
DeepONet representa el operador como una combinación separable:
La branch net resume la función de entrada a través de sus muestras en sensores.
La trunk net construye una base dependiente de la coordenada \(x\).
Su sesgo inductivo es el de una aproximación separable sensor-a-coordenada. Eso la vuelve flexible para entradas irregulares o consultas fuera de la grilla de entrenamiento.
def train_deeponet_supervised(epochs=120, batch_size=64):
model = DeepONet(n_sensors=n_grid).to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=2e-3, weight_decay=1e-6)
loader = DataLoader(
TensorDataset(
torch.from_numpy(forcing_train),
torch.from_numpy(solution_train * output_scale),
),
batch_size=batch_size,
shuffle=True,
)
history = []
start = time.time()
for epoch in range(1, epochs + 1):
model.train()
running_loss = 0.0
n_examples = 0
for forcing_batch, solution_batch in loader:
forcing_batch = forcing_batch.to(device)
solution_batch = solution_batch.to(device)
optimizer.zero_grad()
prediction = model(forcing_batch, x_query)
loss = torch.mean((prediction - solution_batch) ** 2)
loss.backward()
optimizer.step()
running_loss += loss.item() * forcing_batch.size(0)
n_examples += forcing_batch.size(0)
epoch_loss = running_loss / n_examples
history.append(epoch_loss)
if epoch % 40 == 0 or epoch == 1:
print(f"DeepONet epoch {epoch:3d} | MSE {epoch_loss:.3e}")
elapsed = time.time() - start
return model, history, elapsed
deeponet_model, deeponet_history, deeponet_time = train_deeponet_supervised(epochs=600)
describe_model(deeponet_model)
DeepONet epoch 1 | MSE 7.127e-01
DeepONet epoch 40 | MSE 1.372e-02
DeepONet epoch 80 | MSE 4.233e-03
DeepONet epoch 120 | MSE 8.293e-04
DeepONet epoch 160 | MSE 6.072e-03
DeepONet epoch 200 | MSE 1.464e-03
DeepONet epoch 240 | MSE 1.196e-03
DeepONet epoch 280 | MSE 1.132e-03
DeepONet epoch 320 | MSE 1.507e-03
DeepONet epoch 360 | MSE 3.965e-04
DeepONet epoch 400 | MSE 1.145e-03
DeepONet epoch 440 | MSE 2.274e-04
DeepONet epoch 480 | MSE 8.166e-04
DeepONet epoch 520 | MSE 1.513e-03
DeepONet epoch 560 | MSE 6.778e-04
DeepONet epoch 600 | MSE 7.273e-04
DeepONet(
(branch_net): FeedForward(
(network): Sequential(
(0): Linear(in_features=64, out_features=64, bias=True)
(1): Tanh()
(2): Linear(in_features=64, out_features=64, bias=True)
(3): Tanh()
(4): Linear(in_features=64, out_features=32, bias=True)
)
)
(trunk_net): FeedForward(
(network): Sequential(
(0): Linear(in_features=1, out_features=64, bias=True)
(1): Tanh()
(2): Linear(in_features=64, out_features=64, bias=True)
(3): Tanh()
(4): Linear(in_features=64, out_features=32, bias=True)
)
)
)
Total parameters: 16769
Comparacion in-distribution y extrapolacion#
Vamos a evaluar tres conjuntos:
Validacion: mismos modos y amplitudes que en entrenamiento.
Amplitude OOD: mismos modos, pero con coeficientes mas grandes.
Frequency OOD: aparece un cuarto modo sinusoidal que no estaba en entrenamiento.
Este ultimo test es importante: extrapolar a una frecuencia nueva no es lo mismo que extrapolar a una amplitud nueva.
coeff_amp = coeficientes_muestra(64, train_modes, low=-2.2, high=2.2)
forcing_amp = fuerza_desde_coefs(coeff_amp, x_grid, train_modes)
solution_amp = solucion_desde_coefs(coeff_amp, x_grid, train_modes)
freq_modes = np.arange(1, 5, dtype=np.float32)
coeff_freq = coeficientes_muestra(64, freq_modes, low=-1.25, high=1.25)
forcing_freq = fuerza_desde_coefs(coeff_freq, x_grid, freq_modes)
solution_freq = solucion_desde_coefs(coeff_freq, x_grid, freq_modes)
pred_val_deep = evaluate_deeponet(deeponet_model, forcing_val)
pred_amp_deep = evaluate_deeponet(deeponet_model, forcing_amp)
pred_freq_deep = evaluate_deeponet(deeponet_model, forcing_freq)
# Graficar resultados de DeepONet entrenada
fig, axes = plt.subplots(1, 3, figsize=(16, 4))
# Ejemplo de validación
example_id = 0
axes[0].plot(x_grid, solution_val[example_id], label="Solución exacta", color="black", lw=2)
axes[0].plot(x_grid, pred_val_deep[example_id], "--", label="DeepONet", color="tab:blue", lw=2)
axes[0].set_title("Validación (in-distribution)")
axes[0].set_xlabel("x")
axes[0].set_ylabel("u(x)")
axes[0].legend()
axes[0].grid(alpha=0.3)
# Ejemplo Amplitude OOD
example_amp = 1
axes[1].plot(x_grid, solution_amp[example_amp], label="Solución exacta", color="black", lw=2)
axes[1].plot(x_grid, pred_amp_deep[example_amp], "--", label="DeepONet", color="tab:blue", lw=2)
axes[1].set_title("Amplitude OOD")
axes[1].set_xlabel("x")
axes[1].legend()
axes[1].grid(alpha=0.3)
# Ejemplo Frequency OOD
example_freq = 2
axes[2].plot(x_grid, solution_freq[example_freq], label="Solución exacta", color="black", lw=2)
axes[2].plot(x_grid, pred_freq_deep[example_freq], "--", label="DeepONet", color="tab:blue", lw=2)
axes[2].set_title("Frequency OOD")
axes[2].set_xlabel("x")
axes[2].legend()
axes[2].grid(alpha=0.3)
plt.tight_layout()
plt.show()
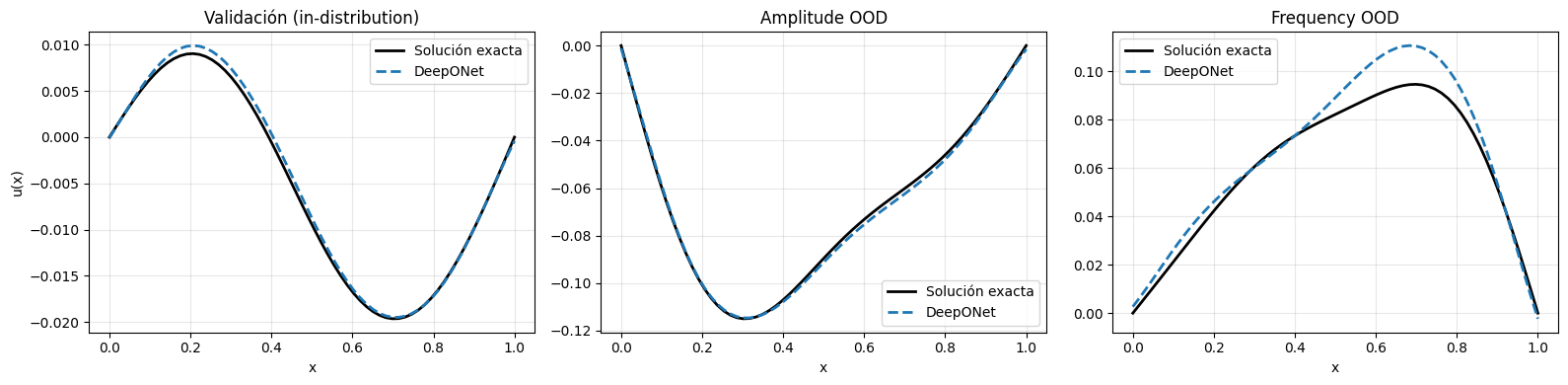
Tras entrenar la arquitectura DeepONet sobre el problema de Poisson 1D, observamos lo siguiente:
El modelo logra aprender el operador que mapea la función de entrada \(a(x)\) a la solución \(u(x)\) con buen desempeño en el conjunto de validación, mostrando errores relativos bajos cuando las funciones de entrada pertenecen a la misma familia que las vistas en entrenamiento.
DeepONet es flexible y puede evaluar la solución en cualquier punto \(x\), no solo en la grilla de entrenamiento, gracias a su estructura separable
branch/trunk.En escenarios de extrapolación, como amplitudes fuera del rango de entrenamiento (Amplitude OOD) o la aparición de nuevas frecuencias (Frequency OOD), el error aumenta, especialmente cuando se introduce un modo no visto durante el entrenamiento.
El tiempo de entrenamiento y la cantidad de parámetros son razonables para este tipo de problemas, y la arquitectura es robusta para entradas irregulares o consultas fuera de la grilla.
En resumen, DeepONet es una herramienta poderosa para aprender operadores en problemas donde la entrada y la salida son funciones, destacándose por su capacidad de generalización espacial y su flexibilidad estructural.
FNO#
La Fourier Neural Operator trabaja directamente sobre una grilla fija. Cada bloque mezcla dos efectos:
una transformación global en Fourier, que actúa sobre un número pequeño de modos bajos;
una capa local punto a punto, que corrige lo que no queda capturado por la parte espectral.
Su sesgo inductivo es naturalmente espectral y grid-based. Cuando la dinámica del operador está bien representada por modos suaves sobre una grilla regular, suele aprender con muy pocos parámetros efectivos.
def train_fno_supervised(epochs=80, batch_size=64):
model = FNO1d().to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=2e-3, weight_decay=1e-6)
loader = DataLoader(
TensorDataset(
torch.from_numpy(forcing_train),
torch.from_numpy(solution_train),
),
batch_size=batch_size,
shuffle=True,
)
history = []
start = time.time()
for epoch in range(1, epochs + 1):
model.train()
running_loss = 0.0
n_examples = 0
for forcing_batch, solution_batch in loader:
forcing_batch = forcing_batch.to(device)
solution_batch = solution_batch.to(device)
optimizer.zero_grad()
prediction = model(forcing_batch, x_grid_t)
loss = torch.mean((prediction - solution_batch) ** 2)
loss.backward()
optimizer.step()
running_loss += loss.item() * forcing_batch.size(0)
n_examples += forcing_batch.size(0)
epoch_loss = running_loss / n_examples
history.append(epoch_loss)
if epoch % 20 == 0 or epoch == 1:
print(f"FNO epoch {epoch:3d} | MSE {epoch_loss:.3e}")
elapsed = time.time() - start
return model, history, elapsed
fno_model, fno_history, fno_time = train_fno_supervised(epochs=600)
describe_model(fno_model)
FNO epoch 1 | MSE 2.119e-02
FNO epoch 20 | MSE 6.378e-06
FNO epoch 40 | MSE 2.382e-06
FNO epoch 60 | MSE 1.590e-06
FNO epoch 80 | MSE 1.211e-06
FNO epoch 100 | MSE 1.014e-06
FNO epoch 120 | MSE 8.776e-07
FNO epoch 140 | MSE 8.113e-07
FNO epoch 160 | MSE 7.608e-07
FNO epoch 180 | MSE 7.206e-07
FNO epoch 200 | MSE 6.568e-07
FNO epoch 220 | MSE 7.090e-07
FNO epoch 240 | MSE 6.707e-07
FNO epoch 260 | MSE 6.281e-07
FNO epoch 280 | MSE 6.098e-07
FNO epoch 300 | MSE 6.119e-07
FNO epoch 320 | MSE 5.625e-07
FNO epoch 340 | MSE 5.437e-07
FNO epoch 360 | MSE 5.731e-07
FNO epoch 380 | MSE 5.546e-07
FNO epoch 400 | MSE 8.537e-07
FNO epoch 420 | MSE 5.142e-07
FNO epoch 440 | MSE 7.774e-07
FNO epoch 460 | MSE 8.709e-07
FNO epoch 480 | MSE 4.893e-07
FNO epoch 500 | MSE 5.258e-07
FNO epoch 520 | MSE 6.746e-07
FNO epoch 540 | MSE 1.282e-06
FNO epoch 560 | MSE 1.619e-06
FNO epoch 580 | MSE 5.264e-07
FNO epoch 600 | MSE 6.267e-07
FNO1d(
(input_proj): Linear(in_features=2, out_features=16, bias=True)
(blocks): ModuleList(
(0-1): 2 x FNOBlock1d(
(spectral): SpectralConv1d()
(pointwise): Conv1d(16, 16, kernel_size=(1,), stride=(1,))
)
)
(output_proj): Sequential(
(0): Linear(in_features=16, out_features=32, bias=True)
(1): GELU(approximate='none')
(2): Linear(in_features=32, out_features=1, bias=True)
)
)
Total parameters: 5265
Misma comparación que antes pero para ambas redes
coeff_amp = coeficientes_muestra(64, train_modes, low=-2.2, high=2.2)
forcing_amp = fuerza_desde_coefs(coeff_amp, x_grid, train_modes)
solution_amp = solucion_desde_coefs(coeff_amp, x_grid, train_modes)
freq_modes = np.arange(1, 5, dtype=np.float32)
coeff_freq = coeficientes_muestra(64, freq_modes, low=-1.25, high=1.25)
forcing_freq = fuerza_desde_coefs(coeff_freq, x_grid, freq_modes)
solution_freq = solucion_desde_coefs(coeff_freq, x_grid, freq_modes)
pred_val_deep = evaluate_deeponet(deeponet_model, forcing_val)
pred_amp_deep = evaluate_deeponet(deeponet_model, forcing_amp)
pred_freq_deep = evaluate_deeponet(deeponet_model, forcing_freq)
pred_val_fno = evaluate_fno(fno_model, forcing_val)
pred_amp_fno = evaluate_fno(fno_model, forcing_amp)
pred_freq_fno = evaluate_fno(fno_model, forcing_freq)
comparison_df = pd.DataFrame(
[
{
"modelo": "DeepONet",
"tiempo_entrenamiento_s": deeponet_time,
"val_relL2": relative_l2(pred_val_deep, solution_val).mean(),
"amp_ood_relL2": relative_l2(pred_amp_deep, solution_amp).mean(),
"freq_ood_relL2": relative_l2(pred_freq_deep, solution_freq).mean(),
},
{
"modelo": "FNO",
"tiempo_entrenamiento_s": fno_time,
"val_relL2": relative_l2(pred_val_fno, solution_val).mean(),
"amp_ood_relL2": relative_l2(pred_amp_fno, solution_amp).mean(),
"freq_ood_relL2": relative_l2(pred_freq_fno, solution_freq).mean(),
},
]
)
comparison_df.round(4)
| modelo | tiempo_entrenamiento_s | val_relL2 | amp_ood_relL2 | freq_ood_relL2 | |
|---|---|---|---|---|---|
| 0 | DeepONet | 6.1406 | 0.0234 | 0.0608 | 0.3448 |
| 1 | FNO | 51.2920 | 0.0242 | 0.0342 | 0.0882 |
fig, axes = plt.subplots(2, 3, figsize=(14, 8))
axes[0, 0].semilogy(deeponet_history, label="DeepONet")
axes[0, 0].semilogy(fno_history, label="FNO")
axes[0, 0].set_title("Historia de entrenamiento")
axes[0, 0].set_xlabel("epoch")
axes[0, 0].set_ylabel("MSE")
axes[0, 0].grid(alpha=0.25)
axes[0, 0].legend()
val_errors_deep = relative_l2(pred_val_deep, solution_val)
val_errors_fno = relative_l2(pred_val_fno, solution_val)
axes[0, 1].hist(val_errors_deep, bins=16, alpha=0.75, label="DeepONet")
axes[0, 1].hist(val_errors_fno, bins=16, alpha=0.75, label="FNO")
axes[0, 1].set_title("Error relativo en validacion")
axes[0, 1].set_xlabel("relL2")
axes[0, 1].grid(alpha=0.25)
axes[0, 1].legend()
metrics = comparison_df.set_index("modelo")[["val_relL2", "amp_ood_relL2", "freq_ood_relL2"]]
metrics.plot(kind="bar", ax=axes[0, 2], rot=0)
axes[0, 2].set_title("Comparacion de errores medios")
axes[0, 2].set_ylabel("relL2")
axes[0, 2].grid(alpha=0.25)
example_id = 4
axes[1, 0].plot(x_grid, solution_val[example_id], color="black", lw=2, label="exacta")
axes[1, 0].plot(x_grid, pred_val_deep[example_id], "--", lw=2, label="DeepONet")
axes[1, 0].plot(x_grid, pred_val_fno[example_id], ":", lw=3, label="FNO")
axes[1, 0].set_title("Ejemplo en validacion")
axes[1, 0].set_xlabel("x")
axes[1, 0].set_ylabel("u(x)")
axes[1, 0].grid(alpha=0.25)
axes[1, 0].legend()
example_amp = 2
axes[1, 1].plot(x_grid, solution_amp[example_amp], color="black", lw=2, label="exacta")
axes[1, 1].plot(x_grid, pred_amp_deep[example_amp], "--", lw=2, label="DeepONet")
axes[1, 1].plot(x_grid, pred_amp_fno[example_amp], ":", lw=3, label="FNO")
axes[1, 1].set_title("Amplitude OOD")
axes[1, 1].set_xlabel("x")
axes[1, 1].grid(alpha=0.25)
axes[1, 1].legend()
example_freq = 1
axes[1, 2].plot(x_grid, solution_freq[example_freq], color="black", lw=2, label="exacta")
axes[1, 2].plot(x_grid, pred_freq_deep[example_freq], "--", lw=2, label="DeepONet")
axes[1, 2].plot(x_grid, pred_freq_fno[example_freq], ":", lw=3, label="FNO")
axes[1, 2].set_title("Frequency OOD")
axes[1, 2].set_xlabel("x")
axes[1, 2].grid(alpha=0.25)
axes[1, 2].legend()
plt.tight_layout()
plt.show()
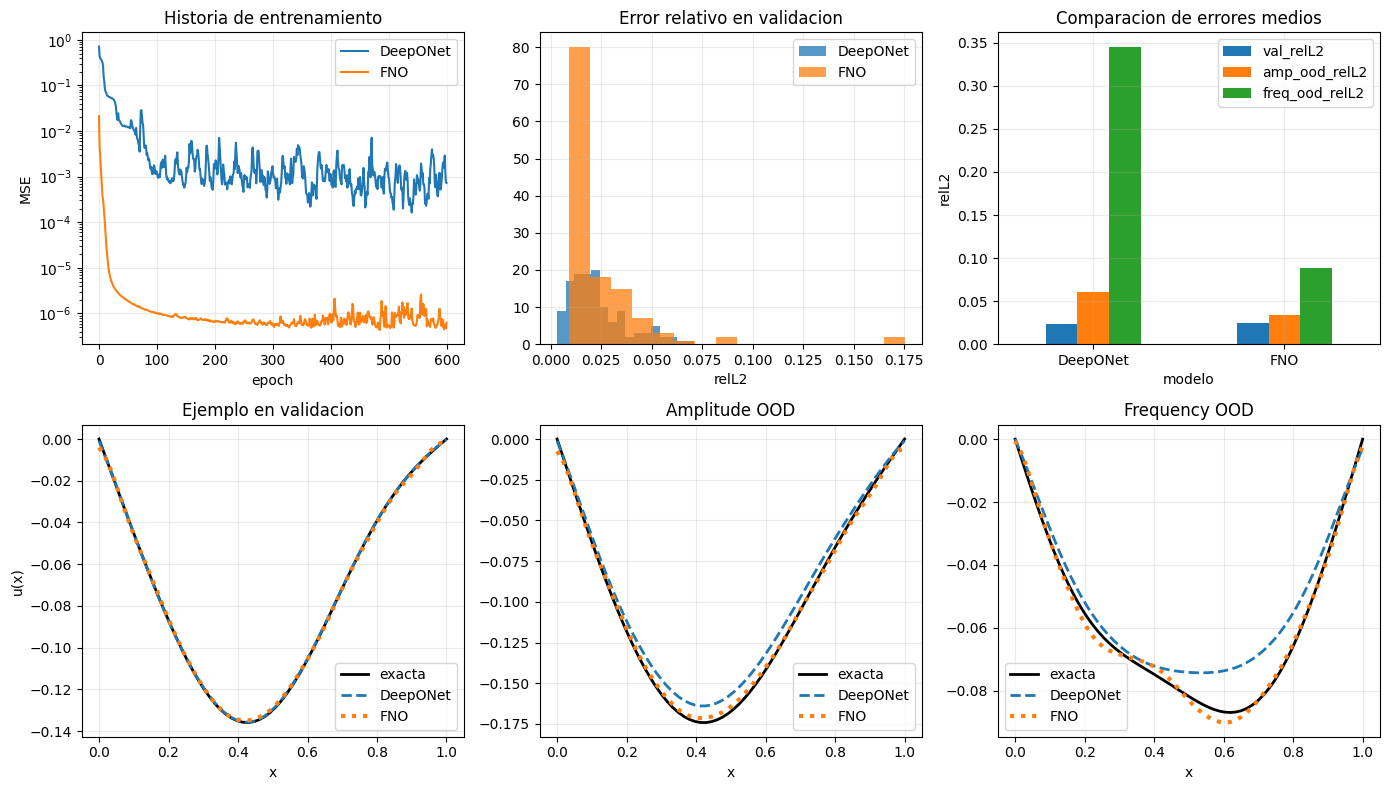
En este problema, sobre una grilla uniforme fija, la FNO suele salir favorecida por dos razones:
su sesgo inductivo es espectral y global, muy alineado con una familia de soluciones suaves escritas en senos;
la arquitectura comparte pesos a lo largo de la grilla, lo que reduce la carga estadistica del aprendizaje.
DeepONet, por su parte, mantiene ventajas conceptuales importantes:
separa claramente el procesamiento de la función de entrada y de la coordenada de consulta;
puede evaluarse en puntos continuos \(x\) si entrenamos una
trunkadecuada;no necesita que la entrada llegue en una malla estrictamente regular.
La extrapolación también muestra dos regimens distintos:
amplitud nueva: ambos modelos se degradan, pero FNO degrada menos en esta configuracion;
frecuencia nueva: agregar un modo no visto es bastante mas dificil que cambiar amplitudes, y ahi aparece con claridad el límite de la extrapolación estructural.
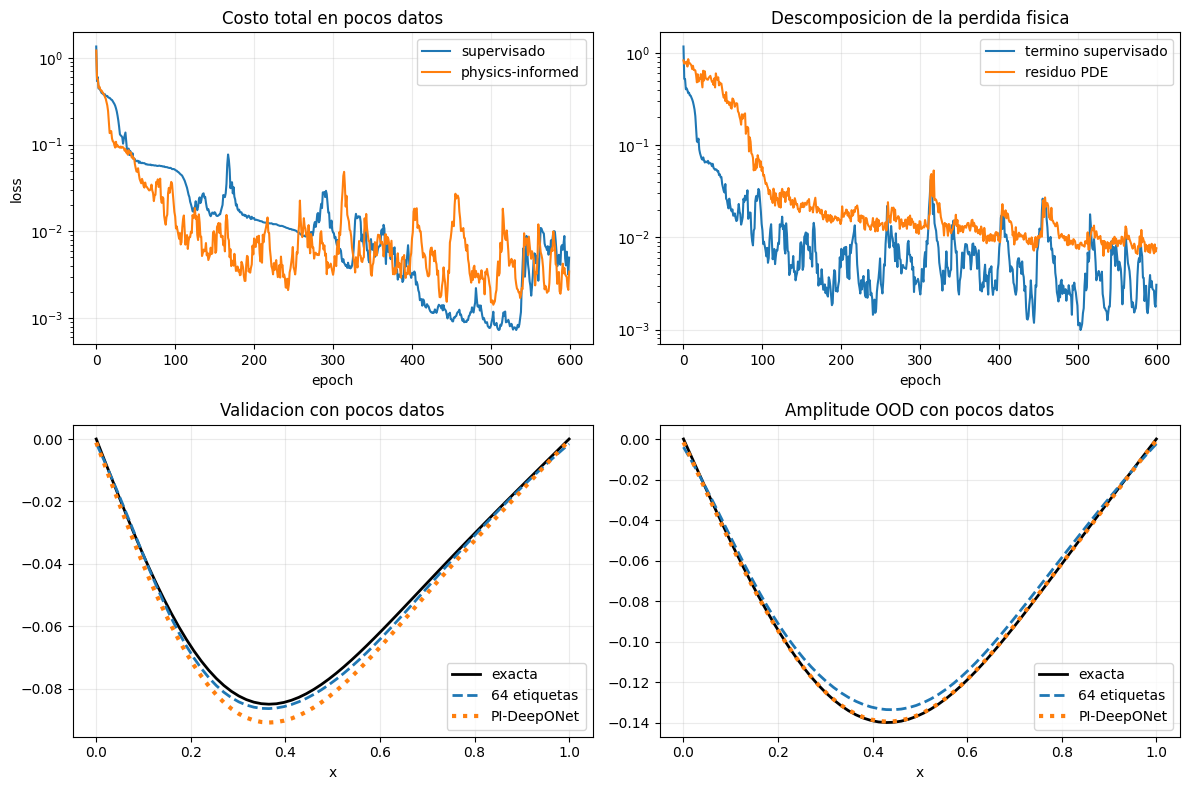
Physics-informed operator learning con pocos datos#
Ahora cambiamos el escenario: suponemos que solo tenemos 64 pares supervisados \((a_i, u_i)\), pero seguimos conociendo la PDE.
La idea es entrenar un operador neural con una perdida mixta:
Usaremos DeepONet para esta parte porque su trunk depende de la coordenada continua \(x\), de modo que podemos derivarla dos veces con autograd y construir el residual
La pregunta no es si supera al mejor modelo completamente supervisado, sino si reduce la necesidad de datos.
def train_deeponet_low_data(epochs=120, batch_size=32):
model = DeepONet(n_sensors=n_grid).to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=2e-3, weight_decay=1e-6)
loader = DataLoader(
TensorDataset(
torch.from_numpy(forcing_train[:64]),
torch.from_numpy(solution_train[:64] * output_scale),
),
batch_size=batch_size,
shuffle=True,
)
history = []
start = time.time()
for epoch in range(1, epochs + 1):
model.train()
running_loss = 0.0
n_examples = 0
for forcing_batch, solution_batch in loader:
forcing_batch = forcing_batch.to(device)
solution_batch = solution_batch.to(device)
optimizer.zero_grad()
prediction = model(forcing_batch, x_query)
loss = torch.mean((prediction - solution_batch) ** 2)
loss.backward()
optimizer.step()
running_loss += loss.item() * forcing_batch.size(0)
n_examples += forcing_batch.size(0)
history.append(running_loss / n_examples)
elapsed = time.time() - start
return model, history, elapsed
def train_pi_deeponet(epochs=120, batch_size=16, lambda_phys=0.05, lambda_bc=5.0):
model = DeepONet(n_sensors=n_grid).to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=2e-3, weight_decay=1e-6)
labeled_loader = DataLoader(
TensorDataset(
torch.from_numpy(forcing_train[:64]),
torch.from_numpy(solution_train[:64] * output_scale),
),
batch_size=batch_size,
shuffle=True,
)
all_forcing_t = torch.from_numpy(forcing_train).to(device)
history = {"data": [], "physics": [], "total": []}
start = time.time()
for epoch in range(1, epochs + 1):
model.train()
data_running = 0.0
phys_running = 0.0
total_running = 0.0
n_examples = 0
for forcing_batch, solution_batch in labeled_loader:
forcing_batch = forcing_batch.to(device)
solution_batch = solution_batch.to(device)
optimizer.zero_grad()
supervised_prediction = model(forcing_batch, x_query)
loss_data = torch.mean((supervised_prediction - solution_batch) ** 2)
physics_idx = torch.randint(0, all_forcing_t.size(0), (batch_size,), device=device)
forcing_phys = all_forcing_t[physics_idx]
query_phys = x_query.clone().detach().requires_grad_(True)
trunk_code, trunk_xx = trunk_with_second_derivative(model.trunk_net, query_phys)
branch_code = model.branch_net(forcing_phys)
pred_phys = branch_code @ trunk_code.T + model.bias
pred_xx = branch_code @ trunk_xx.T
residual = -(pred_xx / output_scale) - forcing_phys
loss_phys = torch.mean(residual[:, 1:-1] ** 2)
loss_bc = torch.mean((pred_phys[:, [0, -1]] / output_scale) ** 2)
loss = loss_data + lambda_phys * loss_phys + lambda_bc * loss_bc
loss.backward()
optimizer.step()
data_running += loss_data.item() * forcing_batch.size(0)
phys_running += loss_phys.item() * forcing_batch.size(0)
total_running += loss.item() * forcing_batch.size(0)
n_examples += forcing_batch.size(0)
history["data"].append(data_running / n_examples)
history["physics"].append(phys_running / n_examples)
history["total"].append(total_running / n_examples)
if epoch % 40 == 0 or epoch == 1:
print(
f"PI-DeepONet epoch {epoch:3d} | data {history['data'][-1]:.3e} | physics {history['physics'][-1]:.3e}"
)
elapsed = time.time() - start
return model, history, elapsed
low_data_model, low_data_history, low_data_time = train_deeponet_low_data(epochs=600)
pi_model, pi_history, pi_time = train_pi_deeponet(epochs=600)
PI-DeepONet epoch 1 | data 1.171e+00 | physics 8.275e-01
PI-DeepONet epoch 40 | data 5.524e-02 | physics 5.283e-01
PI-DeepONet epoch 80 | data 2.560e-02 | physics 1.325e-01
PI-DeepONet epoch 120 | data 7.212e-03 | physics 2.666e-02
PI-DeepONet epoch 160 | data 7.212e-03 | physics 2.600e-02
PI-DeepONet epoch 200 | data 4.724e-03 | physics 1.391e-02
PI-DeepONet epoch 240 | data 2.199e-03 | physics 1.391e-02
PI-DeepONet epoch 280 | data 4.707e-03 | physics 1.431e-02
PI-DeepONet epoch 320 | data 1.280e-02 | physics 2.595e-02
PI-DeepONet epoch 360 | data 8.308e-03 | physics 1.371e-02
PI-DeepONet epoch 400 | data 5.145e-03 | physics 9.207e-03
PI-DeepONet epoch 440 | data 2.245e-03 | physics 8.956e-03
PI-DeepONet epoch 480 | data 3.467e-03 | physics 1.090e-02
PI-DeepONet epoch 520 | data 7.338e-03 | physics 1.191e-02
PI-DeepONet epoch 560 | data 4.424e-03 | physics 9.646e-03
PI-DeepONet epoch 600 | data 3.057e-03 | physics 7.600e-03
pred_val_low = evaluate_deeponet(low_data_model, forcing_val)
pred_val_pi = evaluate_deeponet(pi_model, forcing_val)
pred_amp_low = evaluate_deeponet(low_data_model, forcing_amp)
pred_amp_pi = evaluate_deeponet(pi_model, forcing_amp)
pred_freq_low = evaluate_deeponet(low_data_model, forcing_freq)
pred_freq_pi = evaluate_deeponet(pi_model, forcing_freq)
low_data_df = pd.DataFrame(
[
{
"modelo": "DeepONet (64 etiquetas)",
"tiempo_entrenamiento_s": low_data_time,
"val_relL2": relative_l2(pred_val_low, solution_val).mean(),
"amp_ood_relL2": relative_l2(pred_amp_low, solution_amp).mean(),
"freq_ood_relL2": relative_l2(pred_freq_low, solution_freq).mean(),
},
{
"modelo": "PI-DeepONet (64 etiquetas + residual)",
"tiempo_entrenamiento_s": pi_time,
"val_relL2": relative_l2(pred_val_pi, solution_val).mean(),
"amp_ood_relL2": relative_l2(pred_amp_pi, solution_amp).mean(),
"freq_ood_relL2": relative_l2(pred_freq_pi, solution_freq).mean(),
},
]
)
low_data_df.round(4)
| modelo | tiempo_entrenamiento_s | val_relL2 | amp_ood_relL2 | freq_ood_relL2 | |
|---|---|---|---|---|---|
| 0 | DeepONet (64 etiquetas) | 1.2813 | 0.0567 | 0.1148 | 0.1248 |
| 1 | PI-DeepONet (64 etiquetas + residual) | 34.9187 | 0.0574 | 0.1074 | 0.2716 |
fig, axes = plt.subplots(2, 2, figsize=(12, 8))
axes[0, 0].semilogy(low_data_history, label="supervisado")
axes[0, 0].semilogy(pi_history["total"], label="physics-informed")
axes[0, 0].set_title("Costo total en pocos datos")
axes[0, 0].set_xlabel("epoch")
axes[0, 0].set_ylabel("loss")
axes[0, 0].grid(alpha=0.25)
axes[0, 0].legend()
axes[0, 1].semilogy(pi_history["data"], label="termino supervisado")
axes[0, 1].semilogy(pi_history["physics"], label="residuo PDE")
axes[0, 1].set_title("Descomposicion de la perdida fisica")
axes[0, 1].set_xlabel("epoch")
axes[0, 1].grid(alpha=0.25)
axes[0, 1].legend()
example_small = 2
axes[1, 0].plot(x_grid, solution_val[example_small], color="black", lw=2, label="exacta")
axes[1, 0].plot(x_grid, pred_val_low[example_small], "--", lw=2, label="64 etiquetas")
axes[1, 0].plot(x_grid, pred_val_pi[example_small], ":", lw=3, label="PI-DeepONet")
axes[1, 0].set_title("Validacion con pocos datos")
axes[1, 0].set_xlabel("x")
axes[1, 0].grid(alpha=0.25)
axes[1, 0].legend()
example_amp = 5
axes[1, 1].plot(x_grid, solution_amp[example_amp], color="black", lw=2, label="exacta")
axes[1, 1].plot(x_grid, pred_amp_low[example_amp], "--", lw=2, label="64 etiquetas")
axes[1, 1].plot(x_grid, pred_amp_pi[example_amp], ":", lw=3, label="PI-DeepONet")
axes[1, 1].set_title("Amplitude OOD con pocos datos")
axes[1, 1].set_xlabel("x")
axes[1, 1].grid(alpha=0.25)
axes[1, 1].legend()
plt.tight_layout()
plt.show()
low_data_df.round(4)
| modelo | tiempo_entrenamiento_s | val_relL2 | amp_ood_relL2 | freq_ood_relL2 | |
|---|---|---|---|---|---|
| 0 | DeepONet (64 etiquetas) | 1.2813 | 0.0567 | 0.1148 | 0.1248 |
| 1 | PI-DeepONet (64 etiquetas + residual) | 34.9187 | 0.0574 | 0.1074 | 0.2716 |
Conclusión#
Este ejemplo deja tres mensajes prácticos:
DeepONet y FNO aprenden operadores, no soluciones puntuales.
El sesgo inductivo importa: en una grilla regular y con soluciones suaves dominadas por pocos modos, la FNO fue mas eficiente y extrapoló mejor.
La fisica ayuda sobre todo cuando faltan etiquetas: el esquema
PI-DeepONetmejoró claramente el error de validación y la extrapolación en amplitud frente a un DeepONet entrenado con solo 64 ejemplos supervisados.
También aparece un límite importante: imponer la PDE no garantiza extrapolar a estructuras que no estaban en la familia de entrenamiento. En particular, introducir un modo espacial nuevo sigue siendo un problema mas duro que simplemente cambiar la amplitud.