Inferencia Bayesiana de la gravedad: MCMC y ABC#
![]()
En esta notebook vamos a estimar la aceleración de la gravedad \(g\) a partir de mediciones de tiempos de caída libre. El objetivo no es solamente obtener un número, sino describir la incertidumbre sobre ese número usando dos enfoques bayesianos:
MCMC con Metropolis-Hastings, cuando podemos escribir la verosimilitud.
ABC por rechazo, cuando preferimos trabajar sólo con un simulador y una distancia entre datos.
import matplotlib.pyplot as plt
import torch
SEED = 42
torch.manual_seed(SEED)
plt.rcParams["figure.figsize"] = (7, 4)
plt.rcParams["axes.grid"] = True
El problema físico#
Para una caída libre desde una altura \(h\), sin rozamiento y partiendo del reposo, el tiempo ideal de caída es
En un experimento real no observamos exactamente ese valor ideal. Vamos a modelar cada medición como
Nuestro parámetro desconocido es \(g\). Como información previa usaremos un prior uniforme amplio:
Como los datos de esta notebook son sintéticos, conocemos el valor usado para generarlos: \(g_{\mathrm{real}}=9.81\,\mathrm{m/s^2}\). En un experimento real ese valor no estaría disponible.
g_real = 9.81
sigma_t = 0.02
alturas = torch.tensor([0.5, 1.0, 1.5, 2.0, 2.5])
def tiempos_ideales(g, h):
return torch.sqrt(2.0 * h / g)
def simular_experimento(g, alturas, sigma_t):
t_ideal = tiempos_ideales(g, alturas)
ruido = sigma_t * torch.randn_like(alturas)
return t_ideal + ruido
t_obs = simular_experimento(g_real, alturas, sigma_t)
print("Alturas (m):", alturas)
print("Tiempos observados (s):", t_obs)
Alturas (m): tensor([0.5000, 1.0000, 1.5000, 2.0000, 2.5000])
Tiempos observados (s): tensor([0.3260, 0.4541, 0.5577, 0.6432, 0.6915])
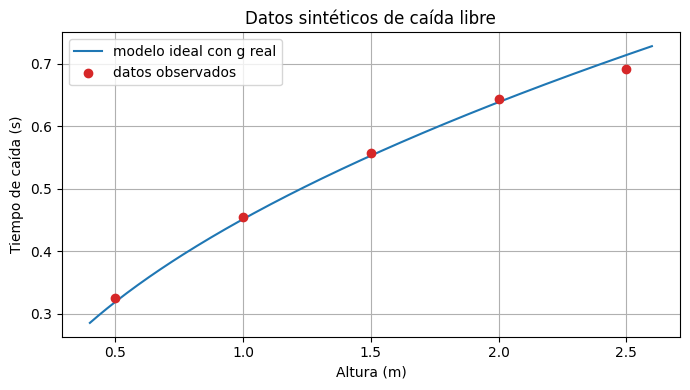
h_grid = torch.linspace(0.4, 2.6, 200)
plt.plot(h_grid, tiempos_ideales(torch.tensor(g_real), h_grid), label="modelo ideal con g real")
plt.scatter(alturas, t_obs, color="tab:red", zorder=3, label="datos observados")
plt.xlabel("Altura (m)")
plt.ylabel("Tiempo de caída (s)")
plt.title("Datos sintéticos de caída libre")
plt.legend()
plt.tight_layout()
plt.show()
Posterior bayesiana#
La regla de Bayes nos dice que
En este problema sí conocemos la verosimilitud, porque asumimos ruido gaussiano independiente en cada medición:
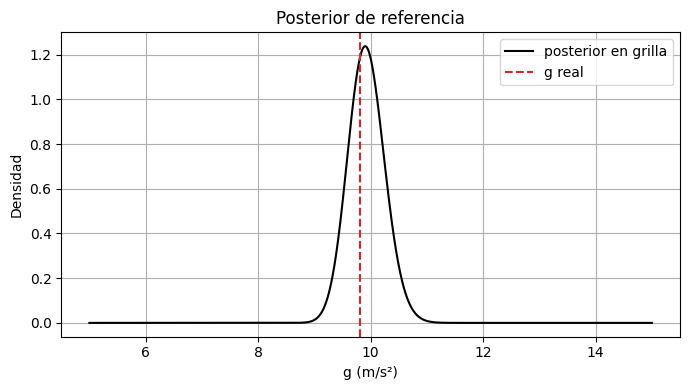
Trabajaremos con log-probabilidades porque son más estables numéricamente. Para tener una referencia visual, también calculamos la posterior en una grilla fina de valores de \(g\).
prior_low = 5.0
prior_high = 15.0
def log_prior(g):
if prior_low <= g <= prior_high:
return torch.tensor(0.0)
return torch.tensor(-float("inf"))
def log_likelihood(g):
t_pred = tiempos_ideales(g, alturas)
residuos = t_obs - t_pred
return -0.5 * torch.sum((residuos / sigma_t) ** 2)
def log_posterior(g):
return log_prior(g) + log_likelihood(g)
def log_posterior_grid(g_values):
t_pred = torch.sqrt(2.0 * alturas.unsqueeze(0) / g_values.unsqueeze(1))
residuos = t_obs.unsqueeze(0) - t_pred
log_like = -0.5 * torch.sum((residuos / sigma_t) ** 2, dim=1)
log_prior_values = torch.where(
(g_values >= prior_low) & (g_values <= prior_high),
torch.zeros_like(g_values),
torch.full_like(g_values, -float("inf")),
)
return log_prior_values + log_like
g_grid = torch.linspace(prior_low, prior_high, 2000)
logp_grid = log_posterior_grid(g_grid)
posterior_grid = torch.exp(logp_grid - torch.max(logp_grid))
posterior_grid = posterior_grid / torch.trapz(posterior_grid, g_grid)
plt.plot(g_grid, posterior_grid, color="black", label="posterior en grilla")
plt.axvline(g_real, linestyle="--", color="tab:red", label="g real")
plt.xlabel("g (m/s²)")
plt.ylabel("Densidad")
plt.title("Posterior de referencia")
plt.legend()
plt.tight_layout()
plt.show()
Enfoque 1: MCMC con Metropolis-Hastings#
MCMC construye una cadena de valores de \(g\) cuya distribución estacionaria es la posterior. En Metropolis-Hastings repetimos estos pasos:
Partimos de un valor actual \(g\).
Proponemos un nuevo valor cercano: \(g' = g + \eta\), con \(\eta\) aleatorio.
Comparamos la posterior en \(g'\) contra la posterior en \(g\).
Aceptamos siempre si la propuesta mejora la posterior; si no, la aceptamos con cierta probabilidad.
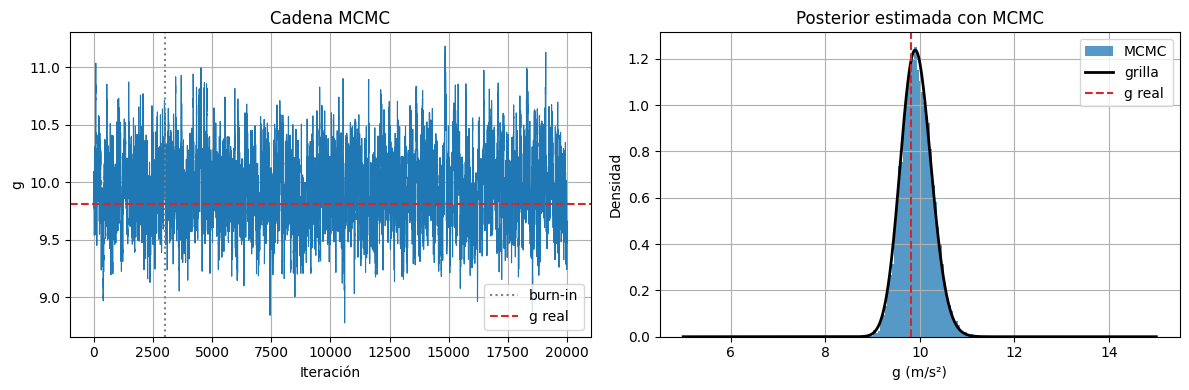
La cadena no produce muestras independientes, pero después de descartar un período inicial de burn-in, sus valores se pueden usar para resumir la incertidumbre posterior.
def metropolis_hastings(n_steps, proposal_width, g_inicial):
samples = torch.zeros(n_steps)
g_actual = torch.tensor(float(g_inicial))
logp_actual = log_posterior(g_actual)
aceptados = 0
for i in range(n_steps):
g_propuesta = g_actual + proposal_width * torch.randn(())
logp_propuesta = log_posterior(g_propuesta)
log_alpha = logp_propuesta - logp_actual
if torch.log(torch.rand(())) < log_alpha:
g_actual = g_propuesta
logp_actual = logp_propuesta
aceptados += 1
samples[i] = g_actual
return samples, aceptados / n_steps
n_steps = 20_000
proposal_width = 0.15
burn_in = 3_000
samples_mcmc, tasa_aceptacion_mcmc = metropolis_hastings(
n_steps=n_steps,
proposal_width=proposal_width,
g_inicial=10.0,
)
g_posterior_mcmc = samples_mcmc[burn_in:]
print(f"Cantidad de pasos MCMC: {n_steps}")
print(f"Burn-in descartado: {burn_in}")
print(f"Tasa de aceptación: {tasa_aceptacion_mcmc:.4f}")
print(f"Media posterior MCMC: {g_posterior_mcmc.mean().item():.3f} m/s²")
print(f"Desvío estándar posterior MCMC: {g_posterior_mcmc.std().item():.3f} m/s²")
Cantidad de pasos MCMC: 20000
Burn-in descartado: 3000
Tasa de aceptación: 0.8530
Media posterior MCMC: 9.946 m/s²
Desvío estándar posterior MCMC: 0.326 m/s²
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].plot(samples_mcmc, linewidth=0.8)
axes[0].axvline(burn_in, linestyle=":", color="gray", label="burn-in")
axes[0].axhline(g_real, linestyle="--", color="tab:red", label="g real")
axes[0].set_xlabel("Iteración")
axes[0].set_ylabel("g")
axes[0].set_title("Cadena MCMC")
axes[0].legend()
axes[1].hist(g_posterior_mcmc, bins=50, density=True, alpha=0.75, label="MCMC")
axes[1].plot(g_grid, posterior_grid, color="black", linewidth=2, label="grilla")
axes[1].axvline(g_real, linestyle="--", color="tab:red", label="g real")
axes[1].set_xlabel("g (m/s²)")
axes[1].set_ylabel("Densidad")
axes[1].set_title("Posterior estimada con MCMC")
axes[1].legend()
plt.tight_layout()
plt.show()
Comentarios sobre MCMC#
En este ejemplo MCMC aprovecha toda la información de la verosimilitud gaussiana. La tolerancia al ruido no se elige a mano: está codificada por \(\sigma_t\) en el modelo probabilístico.
Sus ventajas principales son:
aproxima la posterior correcta si la cadena está bien mezclada;
usa la forma completa de la verosimilitud;
permite calcular medias, intervalos de credibilidad y otros resúmenes de incertidumbre.
Sus costos son:
requiere poder evaluar \(p(t^{\mathrm{obs}}\mid g)\), aunque sea hasta una constante;
las muestras están correlacionadas;
hay que elegir y diagnosticar la propuesta, el burn-in y la mezcla de la cadena.
Enfoque 2: ABC por rechazo#
ABC significa Approximate Bayesian Computation. La idea central es evitar escribir la verosimilitud. En su lugar usamos el simulador:
Muestreamos un valor \(g\) del prior.
Simulamos un experimento completo con ese \(g\).
Comparamos la simulación con los datos observados usando una distancia.
Aceptamos \(g\) si la distancia es menor que una tolerancia \(\epsilon\).
En esta notebook usamos como distancia la norma euclídea entre el vector de tiempos simulados y el vector observado:
Cuanto más chico sea \(\epsilon\), más exigente es la aceptación y más cerca estaremos de la posterior exacta. Pero si \(\epsilon\) es demasiado chico, casi no aceptamos muestras.
def sample_prior(n):
return prior_low + (prior_high - prior_low) * torch.rand(n)
def simular_experimentos_batch(g_values, alturas, sigma_t):
t_ideal = torch.sqrt(2.0 * alturas.unsqueeze(0) / g_values.unsqueeze(1))
ruido = sigma_t * torch.randn_like(t_ideal)
return t_ideal + ruido
def distancia(t_sim, t_obs):
return torch.norm(t_sim - t_obs.unsqueeze(0), p=2, dim=1)
def abc_rechazo(n_propuestas, epsilon):
g_propuestos = sample_prior(n_propuestas)
t_sim = simular_experimentos_batch(g_propuestos, alturas, sigma_t)
distancias = distancia(t_sim, t_obs)
aceptadas = distancias < epsilon
return g_propuestos, distancias, g_propuestos[aceptadas]
n_propuestas = 500_000
epsilon = 0.02
g_propuestos, distancias_abc, g_aceptados_abc = abc_rechazo(n_propuestas, epsilon)
print(f"Cantidad de propuestas ABC: {n_propuestas}")
print(f"Tolerancia epsilon: {epsilon}")
print(f"Cantidad de aceptadas: {len(g_aceptados_abc)}")
print(f"Tasa de aceptación: {len(g_aceptados_abc) / n_propuestas:.4f}")
if len(g_aceptados_abc) > 0:
print(f"Media posterior ABC: {g_aceptados_abc.mean().item():.3f} m/s²")
print(f"Desvío estándar posterior ABC: {g_aceptados_abc.std().item():.3f} m/s²")
Cantidad de propuestas ABC: 500000
Tolerancia epsilon: 0.02
Cantidad de aceptadas: 870
Tasa de aceptación: 0.0017
Media posterior ABC: 9.940 m/s²
Desvío estándar posterior ABC: 0.347 m/s²
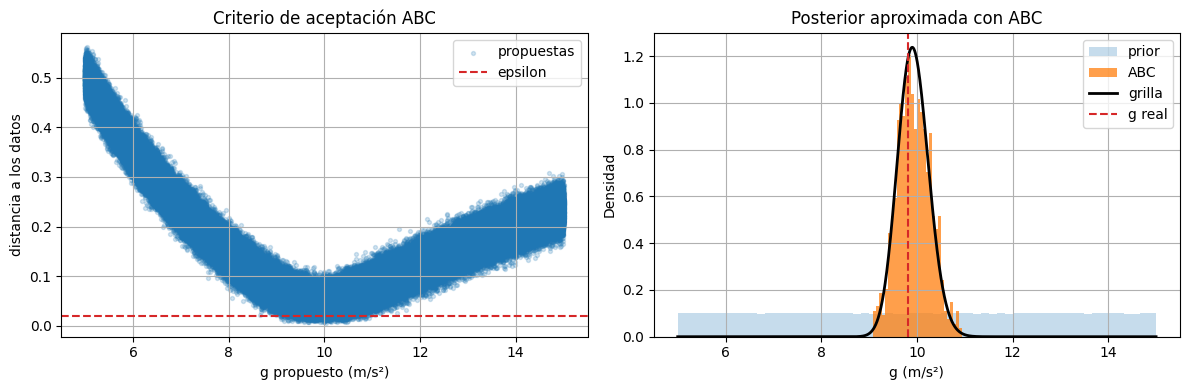
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].scatter(g_propuestos, distancias_abc, s=8, alpha=0.2, label="propuestas")
axes[0].axhline(epsilon, linestyle="--", color="tab:red", label="epsilon")
axes[0].set_xlabel("g propuesto (m/s²)")
axes[0].set_ylabel("distancia a los datos")
axes[0].set_title("Criterio de aceptación ABC")
axes[0].legend()
axes[1].hist(g_propuestos, bins=60, density=True, alpha=0.25, label="prior")
if len(g_aceptados_abc) > 0:
axes[1].hist(g_aceptados_abc, bins=30, density=True, alpha=0.75, label="ABC")
axes[1].plot(g_grid, posterior_grid, color="black", linewidth=2, label="grilla")
axes[1].axvline(g_real, linestyle="--", color="tab:red", label="g real")
axes[1].set_xlabel("g (m/s²)")
axes[1].set_ylabel("Densidad")
axes[1].set_title("Posterior aproximada con ABC")
axes[1].legend()
plt.tight_layout()
plt.show()
Comentarios sobre ABC#
ABC es especialmente útil cuando tenemos un buen simulador pero la verosimilitud es difícil, costosa o directamente imposible de escribir. En ese caso, comparar simulaciones contra observaciones puede ser mucho más natural.
Sus ventajas principales son:
no exige evaluar una verosimilitud explícita;
se adapta bien a modelos generativos complejos;
es muy intuitivo para conectar simulación, datos y parámetros.
Sus costos son:
la posterior es aproximada y depende de \(\epsilon\);
elegir buenas estadísticas resumen y buenas distancias puede ser delicado;
ABC por rechazo suele desperdiciar muchas simulaciones, sobre todo en problemas de mayor dimensión.
def intervalo_credibilidad(samples, nivel=0.90):
alpha = (1.0 - nivel) / 2.0
return torch.quantile(samples, torch.tensor([alpha, 1.0 - alpha]))
def imprimir_resumen(nombre, samples):
intervalo = intervalo_credibilidad(samples)
print(f"{nombre}")
print(f" media: {samples.mean().item():.3f} m/s²")
print(f" desvío: {samples.std().item():.3f} m/s²")
print(f" intervalo 90%: [{intervalo[0].item():.3f}, {intervalo[1].item():.3f}] m/s²")
imprimir_resumen("MCMC", g_posterior_mcmc)
if len(g_aceptados_abc) > 0:
imprimir_resumen("ABC", g_aceptados_abc)
print(f"Valor usado para simular los datos: {g_real:.3f} m/s²")
MCMC
media: 9.946 m/s²
desvío: 0.326 m/s²
intervalo 90%: [9.435, 10.495] m/s²
ABC
media: 9.940 m/s²
desvío: 0.347 m/s²
intervalo 90%: [9.407, 10.500] m/s²
Valor usado para simular los datos: 9.810 m/s²
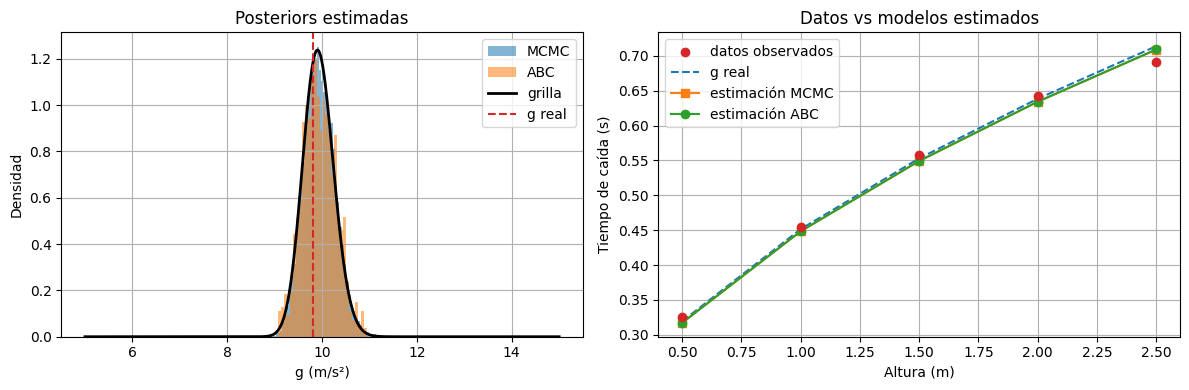
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].hist(g_posterior_mcmc, bins=50, density=True, alpha=0.55, label="MCMC")
if len(g_aceptados_abc) > 0:
axes[0].hist(g_aceptados_abc, bins=30, density=True, alpha=0.55, label="ABC")
axes[0].plot(g_grid, posterior_grid, color="black", linewidth=2, label="grilla")
axes[0].axvline(g_real, linestyle="--", color="tab:red", label="g real")
axes[0].set_xlabel("g (m/s²)")
axes[0].set_ylabel("Densidad")
axes[0].set_title("Posteriors estimadas")
axes[0].legend()
if len(g_aceptados_abc) > 0:
g_est_abc = g_aceptados_abc.mean()
else:
g_est_abc = torch.tensor(float("nan"))
g_est_mcmc = g_posterior_mcmc.mean()
axes[1].scatter(alturas, t_obs, color="tab:red", zorder=3, label="datos observados")
axes[1].plot(alturas, tiempos_ideales(torch.tensor(g_real), alturas), "--", label="g real")
axes[1].plot(alturas, tiempos_ideales(g_est_mcmc, alturas), "-s", label="estimación MCMC")
if len(g_aceptados_abc) > 0:
axes[1].plot(alturas, tiempos_ideales(g_est_abc, alturas), "-o", label="estimación ABC")
axes[1].set_xlabel("Altura (m)")
axes[1].set_ylabel("Tiempo de caída (s)")
axes[1].set_title("Datos vs modelos estimados")
axes[1].legend()
plt.tight_layout()
plt.show()