Reproducción en PyTorch del ejemplo numérico PI-VAE#
![]()
Este notebook reproduce el caso numérico de la Sección 3.1 del artículo “A Physics-Informed Variational Autoencoder for Modeling Power Plant Thermal Systems”.
El objetivo es comparar:
un VAE estándar, entrenado solo con pérdida de reconstrucción y divergencia KL;
un PI-VAE, que agrega pérdidas físicas construidas a partir de las ecuaciones diferenciales parciales indicadas en el artículo.
import copy
import math
import random
from dataclasses import dataclass
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
import matplotlib.pyplot as plt
%matplotlib inline
SEED = 123
random.seed(SEED)
np.random.seed(SEED)
torch.manual_seed(SEED)
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print("Device:", device)
torch.set_default_dtype(torch.float32)
Device: cpu
Generación de datos:#
Definimos un sistema no lineal de seis variables como:
con
def generate_data(n: int, seed=None) -> torch.Tensor:
"""Genera datos del sistema no lineal de la ecuación (31)."""
if seed is not None:
g = torch.Generator().manual_seed(seed)
gamma = torch.rand(n, 1, generator=g) * 3.0
noise = lambda: torch.randn(n, 1, generator=g) * math.sqrt(0.02)
else:
gamma = torch.rand(n, 1) * 3.0
noise = lambda: torch.randn(n, 1) * math.sqrt(0.02)
x1 = gamma + noise()
x2 = 0.3 * gamma**2 + 0.5 * gamma + noise()
x3 = 0.4 * gamma**2 - 1.6 * gamma - 0.4 + noise()
x4 = -x2 + 0.25 + noise()
x5 = gamma**3 + torch.cos(gamma**2) + noise()
x6 = 4 * torch.sin(gamma) + 0.4 * gamma**3 + gamma + noise()
return torch.cat([x1, x2, x3, x4, x5, x6], dim=1)
X_train_raw = generate_data(20, seed=SEED).to(device)
X_test_raw = generate_data(2000, seed=SEED + 1).to(device)
X_train_raw.shape, X_test_raw.shape
(torch.Size([20, 6]), torch.Size([2000, 6]))
Normalización#
Normalizaremos las variables. Esto es fundamental porque \(x_5\) y \(x_6\) tienen rangos mucho mayores que \(x_1\), \(x_2\), \(x_3\) y \(x_4\).
Usamos media y desviación estándar calculadas solo con el conjunto de entrenamiento:
Las pérdidas de reconstrucción se calculan en coordenadas normalizadas, pero las pérdidas físicas se formulan en coordenadas originales, porque las ecuaciones físicas están escritas en variables \(x_j\).
x_mean = X_train_raw.mean(dim=0, keepdim=True)
x_std = X_train_raw.std(dim=0, keepdim=True) + 1e-8
def normalize(x: torch.Tensor) -> torch.Tensor:
return (x - x_mean) / x_std
def unnormalize(x_norm: torch.Tensor) -> torch.Tensor:
return x_norm * x_std + x_mean
X_train = normalize(X_train_raw)
X_test = normalize(X_test_raw)
print("Media train raw:", x_mean.detach().cpu().numpy().round(3))
print("Std train raw :", x_std.detach().cpu().numpy().round(3))
Media train raw: [[ 1.151 1.175 -1.486 -0.933 4.404 5.366]]
Std train raw : [[0.833 1.013 0.491 1.007 5.383 3.451]]
Modelo VAE#
El VAE codifica cada muestra \(x\) en una distribución gaussiana latente:
Luego usa el truco de reparametrización:
Finalmente, el decoder reconstruye:
En este ejemplo conviene usar un espacio latente unidimensional. La razón es que los datos fueron generados a partir de un único factor oculto, \(\gamma\), de modo que imponer la física sobre un latente 1D hace mucho más clara la interpretación de derivadas como
class VAE(nn.Module):
"""VAE con arquitectura 6-16-8-1-8-16-6."""
def __init__(self, input_dim: int = 6, latent_dim: int = 1):
super().__init__()
self.encoder = nn.Sequential(
nn.Linear(input_dim, 16),
nn.ReLU(),
nn.Linear(16, 8),
nn.ReLU(),
)
self.mu = nn.Linear(8, latent_dim)
self.logvar = nn.Linear(8, latent_dim)
self.decoder = nn.Sequential(
nn.Linear(latent_dim, 8),
nn.ReLU(),
nn.Linear(8, 16),
nn.ReLU(),
nn.Linear(16, input_dim),
)
def encode(self, x: torch.Tensor) -> tuple[torch.Tensor, torch.Tensor]:
h = self.encoder(x)
return self.mu(h), self.logvar(h)
def reparameterize(self, mu: torch.Tensor, logvar: torch.Tensor) -> torch.Tensor:
std = torch.exp(0.5 * logvar)
eps = torch.randn_like(std)
return mu + std * eps
def decode(self, z: torch.Tensor) -> torch.Tensor:
return self.decoder(z)
def forward(self, x: torch.Tensor) -> tuple[torch.Tensor, torch.Tensor, torch.Tensor, torch.Tensor]:
mu, logvar = self.encode(x)
z = self.reparameterize(mu, logvar)
x_hat = self.decode(z)
return x_hat, mu, logvar, z
def reconstruct_deterministic(self, x: torch.Tensor) -> torch.Tensor:
"""Reconstrucción usando z=mu. Es más estable para evaluar métricas."""
mu, _ = self.encode(x)
return self.decode(mu)
Pérdida VAE#
La pérdida del VAE es el negativo del ELBO:
Usamos MSE como pérdida de reconstrucción:
La divergencia KL contra una normal estándar es:
def vae_loss(x: torch.Tensor, x_hat: torch.Tensor, mu: torch.Tensor, logvar: torch.Tensor, beta: float = 0.1):
recon = F.mse_loss(x_hat, x)
kl = -0.5 * torch.mean(1.0 + logvar - mu.pow(2) - logvar.exp())
total = recon + beta * kl
return total, {"recon": recon.detach(), "kl": kl.detach()}
Derivadas físicas vía espacio latente#
El paper calcula derivadas entre variables reconstruidas usando la dependencia común respecto del vector latente \(z\). Para el caso numérico, necesitamos derivadas de la forma:
En esta versión usamos un latente 1D, consistente con el hecho de que el sistema fue generado por un único factor \(\gamma\). Entonces la regla de cadena se simplifica a:
Esta formulación es más estable e interpretable que sumar razones componente a componente en un latente multidimensional.
En código agregamos una estabilización numérica para evitar divisiones por valores cercanos a cero.
def grad_wrt_z(y: torch.Tensor, z: torch.Tensor) -> torch.Tensor:
"""Gradiente dy/dz para un batch. Requiere create_graph=True para backpropagar la pérdida física."""
return torch.autograd.grad(
y,
z,
grad_outputs=torch.ones_like(y),
create_graph=True,
retain_graph=True,
allow_unused=False,
)[0]
def safe_divide(numerator: torch.Tensor, denominator: torch.Tensor, eps: float = 1e-4) -> torch.Tensor:
"""División estabilizada que conserva el signo del denominador."""
sign = torch.where(denominator >= 0, torch.ones_like(denominator), -torch.ones_like(denominator))
denom = torch.where(denominator.abs() < eps, eps * sign, denominator)
return numerator / denom
def derivative_wrt_x1_norm(x_hat_norm: torch.Tensor, z: torch.Tensor, output_index: int) -> torch.Tensor:
"""Calcula d x_i_norm / d x_1_norm asumiendo un latente 1D."""
if z.shape[1] != 1:
raise ValueError(
"Esta formulación física asume latent_dim=1. "
"Para latent_dim>1 haría falta otra definición de d x_i / d x_1."
)
xi = x_hat_norm[:, output_index:output_index + 1]
x1 = x_hat_norm[:, 0:1]
dxi_dz = grad_wrt_z(xi, z)
dx1_dz = grad_wrt_z(x1, z)
return safe_divide(dxi_dz, dx1_dz)
Pérdida física en coordenadas originales#
Las restricciones completas del Modelo 9 de la Tabla 3 son:
Como el decoder produce \(\tilde{x}\), convertimos primero a variables originales:
Además, por cambio de escala:
En la práctica, los residuales no tienen todos la misma escala. Por eso reescalamos cada ecuación por una magnitud típica de su término derecho, para que \(r_5\) y \(r_6\) no dominen toda la optimización.
def pde_loss_model9_raw(
x_hat_norm: torch.Tensor,
z: torch.Tensor,
x_mean: torch.Tensor,
x_std: torch.Tensor,
residual_scale_bias: float = 1.0,
):
"""Pérdida PDE del Modelo 9, evaluada en coordenadas originales."""
x_hat_raw = x_hat_norm * x_std + x_mean
x1 = x_hat_raw[:, 0:1]
# Conversión de derivadas normalizadas a derivadas en coordenadas originales.
scale = x_std / x_std[:, 0:1]
dx2_dx1 = scale[:, 1:2] * derivative_wrt_x1_norm(x_hat_norm, z, 1)
dx3_dx1 = scale[:, 2:3] * derivative_wrt_x1_norm(x_hat_norm, z, 2)
dx4_dx1 = scale[:, 3:4] * derivative_wrt_x1_norm(x_hat_norm, z, 3)
dx5_dx1 = scale[:, 4:5] * derivative_wrt_x1_norm(x_hat_norm, z, 4)
dx6_dx1 = scale[:, 5:6] * derivative_wrt_x1_norm(x_hat_norm, z, 5)
rhs_terms = {
"r2": 0.5 + 0.6 * x1,
"r3": 0.8 * x1 - 1.6,
"r4": -0.5 - 0.6 * x1,
"r5": 3.0 * x1**2 - 2.0 * x1 * torch.sin(x1**2),
"r6": 4.0 * torch.cos(x1) + 1.2 * x1**2 + 1.0,
}
residuals = {
"r2": dx2_dx1 - rhs_terms["r2"],
"r3": dx3_dx1 - rhs_terms["r3"],
"r4": dx4_dx1 - rhs_terms["r4"],
"r5": dx5_dx1 - rhs_terms["r5"],
"r6": dx6_dx1 - rhs_terms["r6"],
}
scaled_residuals = {
name: residuals[name] / (rhs.abs().mean().detach() + residual_scale_bias)
for name, rhs in rhs_terms.items()
}
loss = sum(torch.mean(r.pow(2)) for r in scaled_residuals.values())
diagnostics = {name: torch.mean(torch.abs(r)).detach() for name, r in residuals.items()}
diagnostics["scaled_pde_mse"] = loss.detach()
return loss, diagnostics
Muestras sintéticas en el espacio latente#
El artículo usa Latin Hypercube Sampling en el espacio latente y transforma los puntos para que sigan una normal estándar. Implementamos esa idea con torch.erfinv, usando la identidad:
Estas muestras sintéticas \(z_s\) no tienen pérdida de reconstrucción; solo se usan para ampliar la cobertura de la pérdida física:
def lhs_standard_normal(n_samples: int, latent_dim: int, device: torch.device) -> torch.Tensor:
"""Latin Hypercube Sampling transformado a N(0, I)."""
cols = []
for _ in range(latent_dim):
perm = torch.randperm(n_samples, device=device).float()
u = (perm + torch.rand(n_samples, device=device)) / n_samples
u = u.clamp(1e-6, 1 - 1e-6)
z_col = math.sqrt(2.0) * torch.erfinv(2.0 * u - 1.0)
cols.append(z_col.unsqueeze(1))
return torch.cat(cols, dim=1).requires_grad_(True)
Pérdida PI-VAE#
La pérdida total del PI-VAE es:
Donde:
\(L^{d}_{phy}\): pérdida física sobre reconstrucciones de datos reales;
\(L^{s}_{phy}\): pérdida física sobre muestras sintéticas generadas desde el espacio latente;
\(w(t)\): un warmup que hace crecer el peso físico gradualmente;
\(\alpha_1\), \(\alpha_2\), \(\beta\): pesos de balanceo.
Dos decisiones prácticas ayudan bastante en este ejemplo:
calcular la física de datos con
z = mu, no con una muestra ruidosa;arrancar con \(\alpha_1\) y \(\alpha_2\) pequeños y aumentarlos con warmup.
@dataclass
class TrainConfig:
latent_dim: int = 1
beta: float = 0.1
alpha1: float = 0.003
alpha2: float = 0.006
lr: float = 1e-3
pivae_lr: float = 3e-4
pretrain_epochs: int = 3000
pivae_epochs: int = 3000
alpha_warmup_epochs: int = 1500
synthetic_samples: int = 128
residual_scale_bias: float = 1.0
print_every: int = 500
def pi_vae_loss(
model: VAE,
x_norm: torch.Tensor,
x_hat_norm: torch.Tensor,
mu: torch.Tensor,
logvar: torch.Tensor,
z: torch.Tensor,
cfg: TrainConfig,
epoch: int,
):
base, base_logs = vae_loss(x_norm, x_hat_norm, mu, logvar, beta=cfg.beta)
# Para la física sobre datos reales usamos z=mu, evitando ruido de muestreo.
z_phy = mu
x_phy_norm = model.decode(z_phy)
phy_data, phy_data_logs = pde_loss_model9_raw(
x_phy_norm,
z_phy,
x_mean,
x_std,
residual_scale_bias=cfg.residual_scale_bias,
)
z_syn = lhs_standard_normal(cfg.synthetic_samples, cfg.latent_dim, device=x_norm.device)
x_syn_norm = model.decode(z_syn)
phy_syn, phy_syn_logs = pde_loss_model9_raw(
x_syn_norm,
z_syn,
x_mean,
x_std,
residual_scale_bias=cfg.residual_scale_bias,
)
warmup = min(1.0, epoch / cfg.alpha_warmup_epochs)
total = base + warmup * (cfg.alpha1 * phy_data + cfg.alpha2 * phy_syn)
logs = {
"total": total.detach(),
"vae": base.detach(),
"recon": base_logs["recon"],
"kl": base_logs["kl"],
"phy_data": phy_data.detach(),
"phy_syn": phy_syn.detach(),
"warmup": torch.tensor(warmup, device=x_norm.device),
}
logs.update({f"data_{k}": v for k, v in phy_data_logs.items()})
logs.update({f"syn_{k}": v for k, v in phy_syn_logs.items()})
return total, logs
Métricas de evaluación#
Usamos las mismas métricas del paper:
Para evaluar reconstrucción usamos z = mu, sin ruido latente, porque da una medición más estable.
def compute_metrics(x: torch.Tensor, x_hat: torch.Tensor) -> dict[str, float]:
mse = torch.mean((x - x_hat) ** 2)
rmse = torch.sqrt(mse)
x_bar = x.mean(dim=0, keepdim=True)
ss_res = torch.sum((x - x_hat) ** 2)
ss_tot = torch.sum((x - x_bar) ** 2)
r2 = 1.0 - ss_res / ss_tot
return {"rmse": float(rmse.detach().cpu()), "r2": float(r2.detach().cpu())}
def evaluate_reconstruction(model: VAE) -> dict[str, dict[str, float]]:
model.eval()
with torch.no_grad():
train_hat_norm = model.reconstruct_deterministic(X_train)
test_hat_norm = model.reconstruct_deterministic(X_test)
train_hat_raw = unnormalize(train_hat_norm)
test_hat_raw = unnormalize(test_hat_norm)
return {
"train_norm": compute_metrics(X_train, train_hat_norm),
"test_norm": compute_metrics(X_test, test_hat_norm),
"train_raw": compute_metrics(X_train_raw, train_hat_raw),
"test_raw": compute_metrics(X_test_raw, test_hat_raw),
}
def print_metrics(title: str, metrics: dict[str, dict[str, float]]) -> None:
print(title)
for split, vals in metrics.items():
print(f" {split:10s} RMSE={vals['rmse']:.4f} R2={vals['r2']:.4f}")
Entrenamiento: etapa 1, VAE estándar#
Primero entrenamos un VAE sin restricciones físicas. Esta etapa corresponde al preentrenamiento del algoritmo del paper y también sirve como baseline.
Un buen diagnóstico inicial es que el VAE pueda reconstruir razonablemente bien las 20 muestras de entrenamiento. Si esto falla, no conviene agregar todavía la pérdida física.
def train_vae_only(model: VAE, cfg: TrainConfig) -> list[dict[str, float]]:
opt = torch.optim.Adam(model.parameters(), lr=cfg.lr)
history = []
for epoch in range(1, cfg.pretrain_epochs + 1):
model.train()
x_hat, mu, logvar, z = model(X_train)
loss, logs = vae_loss(X_train, x_hat, mu, logvar, beta=cfg.beta)
opt.zero_grad()
loss.backward()
opt.step()
if epoch == 1 or epoch % cfg.print_every == 0:
row = {"epoch": epoch, "loss": float(loss.detach().cpu()), **{k: float(v.cpu()) for k, v in logs.items()}}
history.append(row)
print(f"VAE epoch {epoch:5d} | loss={row['loss']:.5f} | recon={row['recon']:.5f} | kl={row['kl']:.5f}")
return history
cfg = TrainConfig()
vae_model = VAE(latent_dim=cfg.latent_dim).to(device)
vae_history = train_vae_only(vae_model, cfg)
vae_state = copy.deepcopy(vae_model.state_dict())
print_metrics("\nMétricas VAE baseline", evaluate_reconstruction(vae_model))
VAE epoch 1 | loss=0.97073 | recon=0.96964 | kl=0.01088
VAE epoch 500 | loss=0.38724 | recon=0.28479 | kl=1.02453
VAE epoch 1000 | loss=0.26628 | recon=0.13590 | kl=1.30375
VAE epoch 1500 | loss=0.24541 | recon=0.11549 | kl=1.29929
VAE epoch 2000 | loss=0.19284 | recon=0.05356 | kl=1.39281
VAE epoch 2500 | loss=0.18790 | recon=0.03883 | kl=1.49070
VAE epoch 3000 | loss=0.22104 | recon=0.07833 | kl=1.42714
Métricas VAE baseline
train_norm RMSE=0.1465 R2=0.9774
test_norm RMSE=0.1925 R2=0.9735
train_raw RMSE=0.2342 R2=0.9921
test_raw RMSE=0.3249 R2=0.9918
Entrenamiento: etapa 2, fine-tuning PI-VAE#
Partimos del VAE preentrenado y agregamos las restricciones físicas de manera gradual. En esta versión hacemos tres cambios para no destruir la reconstrucción demasiado rápido:
usamos
latent_dim=1, acorde al generador real del problema;la física sobre datos reales se calcula con
mu, no con una muestra latente ruidosa;los pesos físicos crecen con
warmupy además usamos unlearning ratemenor en el fine-tuning.
Si el entrenamiento se vuelve inestable, reducir alpha1, alpha2 o aumentar alpha_warmup_epochs.
def train_pivae(model: VAE, cfg: TrainConfig) -> list[dict[str, float]]:
opt = torch.optim.Adam(model.parameters(), lr=cfg.pivae_lr)
history = []
for epoch in range(1, cfg.pivae_epochs + 1):
model.train()
x_hat, mu, logvar, z = model(X_train)
loss, logs = pi_vae_loss(model, X_train, x_hat, mu, logvar, z, cfg, epoch=epoch)
opt.zero_grad()
loss.backward()
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=10.0)
opt.step()
if epoch == 1 or epoch % cfg.print_every == 0:
row = {"epoch": epoch, **{k: float(v.cpu()) for k, v in logs.items()}}
history.append(row)
print(
f"PI-VAE epoch {epoch:5d} | total={row['total']:.5f} | vae={row['vae']:.5f} "
f"| phy_data={row['phy_data']:.5f} | phy_syn={row['phy_syn']:.5f} | warmup={row['warmup']:.3f}"
)
return history
pivae_model = VAE(latent_dim=cfg.latent_dim).to(device)
pivae_model.load_state_dict(vae_state)
pivae_history = train_pivae(pivae_model, cfg)
print_metrics("\nMétricas PI-VAE", evaluate_reconstruction(pivae_model))
PI-VAE epoch 1 | total=0.21412 | vae=0.21412 | phy_data=0.19308 | phy_syn=0.72892 | warmup=0.001
PI-VAE epoch 500 | total=0.30452 | vae=0.30374 | phy_data=0.17422 | phy_syn=0.30288 | warmup=0.333
PI-VAE epoch 1000 | total=0.20777 | vae=0.20649 | phy_data=0.11830 | phy_syn=0.25947 | warmup=0.667
PI-VAE epoch 1500 | total=0.19200 | vae=0.19050 | phy_data=0.14865 | phy_syn=0.17650 | warmup=1.000
PI-VAE epoch 2000 | total=0.19937 | vae=0.19783 | phy_data=0.18598 | phy_syn=0.16295 | warmup=1.000
PI-VAE epoch 2500 | total=0.21021 | vae=0.20893 | phy_data=0.10226 | phy_syn=0.16239 | warmup=1.000
PI-VAE epoch 3000 | total=0.22404 | vae=0.22278 | phy_data=0.09232 | phy_syn=0.16516 | warmup=1.000
Métricas PI-VAE
train_norm RMSE=0.1467 R2=0.9774
test_norm RMSE=0.1983 R2=0.9718
train_raw RMSE=0.2483 R2=0.9911
test_raw RMSE=0.3699 R2=0.9894
Comparación VAE vs PI-VAE#
El paper reporta que el VAE estándar suele tener peor generalización en test, mientras que el PI-VAE mejora al imponer restricciones físicas. Sin embargo, eso no ocurre automáticamente: si la pérdida física domina demasiado, el modelo puede ganar consistencia física pero perder reconstrucción.
Con la configuración ajustada de esta notebook, lo esperable es observar:
alta reconstrucción en train para ambos modelos;
un PI-VAE con residual físico claramente menor;
una reconstrucción de test comparable o mejor que la del baseline, siempre que el balanceo de pérdidas sea razonable.
vae_metrics = evaluate_reconstruction(vae_model)
pivae_metrics = evaluate_reconstruction(pivae_model)
print_metrics("VAE", vae_metrics)
print()
print_metrics("PI-VAE", pivae_metrics)
VAE
train_norm RMSE=0.1465 R2=0.9774
test_norm RMSE=0.1925 R2=0.9735
train_raw RMSE=0.2342 R2=0.9921
test_raw RMSE=0.3249 R2=0.9918
PI-VAE
train_norm RMSE=0.1467 R2=0.9774
test_norm RMSE=0.1983 R2=0.9718
train_raw RMSE=0.2483 R2=0.9911
test_raw RMSE=0.3699 R2=0.9894
Residuos físicos#
Además de RMSE y \(R^2\), conviene medir si las salidas reconstruidas satisfacen las ecuaciones físicas. Para eso calculamos el promedio absoluto de cada residual del Modelo 9.
También reportamos scaled_pde_mse, que es la versión reescalada de la pérdida física usada durante entrenamiento.
def physics_residual_report(model: VAE, x_norm: torch.Tensor, name: str) -> dict[str, float]:
model.eval()
# No usamos torch.no_grad(), porque necesitamos autograd para derivadas respecto de z.
mu, _ = model.encode(x_norm)
z = mu.detach().clone().requires_grad_(True)
x_hat_norm = model.decode(z)
loss, logs = pde_loss_model9_raw(
x_hat_norm,
z,
x_mean,
x_std,
residual_scale_bias=cfg.residual_scale_bias,
)
report = {k: float(v.detach().cpu()) for k, v in logs.items()}
report["pde_mse_total"] = float(loss.detach().cpu())
print(name)
for k, v in report.items():
print(f" {k:15s}: {v:.6f}")
return report
vae_phys = physics_residual_report(vae_model, X_test, "Residual físico VAE - test")
print()
pivae_phys = physics_residual_report(pivae_model, X_test, "Residual físico PI-VAE - test")
Residual físico VAE - test
r2 : 0.278188
r3 : 0.307442
r4 : 0.262134
r5 : 1.681198
r6 : 0.866460
scaled_pde_mse : 0.323557
pde_mse_total : 0.323557
Residual físico PI-VAE - test
r2 : 0.197554
r3 : 0.230530
r4 : 0.180537
r5 : 1.285249
r6 : 0.567357
scaled_pde_mse : 0.105663
pde_mse_total : 0.105663
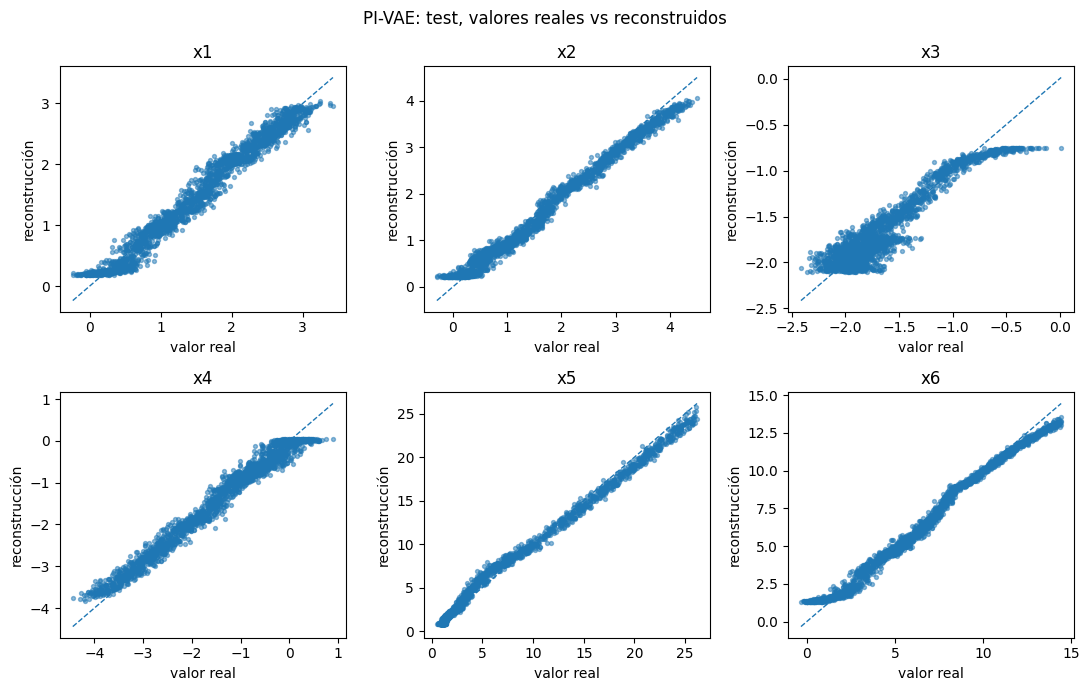
Gráficos de dispersión: verdadero vs reconstruido#
Estos gráficos son análogos a la inspección visual de la Figura 5 del paper: puntos cercanos a la diagonal indican buena reconstrucción.
def plot_true_vs_pred(model: VAE, x_norm: torch.Tensor, x_raw: torch.Tensor, title: str) -> None:
model.eval()
with torch.no_grad():
x_hat_raw = unnormalize(model.reconstruct_deterministic(x_norm))
x_np = x_raw.detach().cpu().numpy()
xhat_np = x_hat_raw.detach().cpu().numpy()
fig, axes = plt.subplots(2, 3, figsize=(11, 7))
axes = axes.ravel()
for j, ax in enumerate(axes):
ax.scatter(x_np[:, j], xhat_np[:, j], s=8, alpha=0.5)
lo = min(x_np[:, j].min(), xhat_np[:, j].min())
hi = max(x_np[:, j].max(), xhat_np[:, j].max())
ax.plot([lo, hi], [lo, hi], linestyle="--", linewidth=1)
ax.set_title(f"x{j+1}")
ax.set_xlabel("valor real")
ax.set_ylabel("reconstrucción")
fig.suptitle(title)
fig.tight_layout()
plt.show()
plot_true_vs_pred(vae_model, X_test, X_test_raw, "VAE: test, valores reales vs reconstruidos")
plot_true_vs_pred(pivae_model, X_test, X_test_raw, "PI-VAE: test, valores reales vs reconstruidos")