Normalizing Flows con PyTorch y Zuko#
![]()
En esta notebook vamos a construir una introduccion a los Normalizing Flows (NF).
Vamos a cubrir:
el cambio de variable y la idea general de un flow;
un flow con affine coupling layer tipo RealNVP implementado en PyTorch;
un MAF y un IAF, con comparacion conceptual y computacional;
un Continuous Normalizing Flow (CNF);
bloques equivalentes usando zuko para comparar con una libreria especializada.
Librerias necesarias#
Esta notebook usa torch, matplotlib y zuko.
Si hace falta, se pueden instalar asi:
# CPU
# !pip install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cpu
# !pip install zuko torchdiffeq
zuko ya trae implementaciones listas de varios flows, incluyendo coupling flows, MAF y CNF.
import math
import time
from dataclasses import dataclass
import matplotlib.pyplot as plt
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
try:
import zuko
except ImportError as exc:
raise ImportError(
"No se pudo importar zuko. Instalar con `pip install zuko torchdiffeq`."
) from exc
SEED = 70
np.random.seed(SEED)
torch.manual_seed(SEED)
if torch.cuda.is_available():
torch.cuda.manual_seed_all(SEED)
DEVICE = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print("Dispositivo:", DEVICE)
print("Torch:", torch.__version__)
print("Zuko:", getattr(zuko, "__version__", "version no disponible"))
plt.rcParams["figure.figsize"] = (6, 4)
plt.rcParams["axes.grid"] = True
Dispositivo: cpu
Torch: 2.5.1
Zuko: 1.4.1
Parte 1#
Idea central: cambio de variable#
Un normalizing flow parte de una distribucion simple \(p_Z(z)\) y aprende una transformacion invertible \(x = f(z)\).
Si \(f\) es biyectiva y diferenciable, entonces la densidad sobre \(x\) se obtiene con el cambio de variable:
En logaritmos:
Entonces un flow necesita dos cosas:
una forma simple de invertir la transformacion;
una forma simple de calcular el log-determinante del jacobiano.
Las arquitecturas mas usadas fuerzan estructuras especiales del jacobiano:
coupling layers: solo parte del vector se transforma en cada capa;
autoregressive flows: la transformacion queda triangular;
continuous flows: la transformacion se describe con una ODE.
def sample_two_moons(n_samples=4000, noise=0.06, device=DEVICE):
n1 = n_samples // 2
n2 = n_samples - n1
theta1 = torch.rand(n1, device=device) * math.pi
theta2 = torch.rand(n2, device=device) * math.pi
moon1 = torch.stack([torch.cos(theta1), torch.sin(theta1)], dim=1)
moon2 = torch.stack([1.0 - torch.cos(theta2), -torch.sin(theta2) - 0.5], dim=1)
x = torch.cat([moon1, moon2], dim=0)
x = x + noise * torch.randn_like(x)
perm = torch.randperm(x.size(0), device=device)
return x[perm]
# clase auxilizar para estandarizar y desestandarizar
class Standardizer:
def __init__(self, mean: torch.Tensor, std: torch.Tensor):
self.mean = mean
self.std = std
def encode(self, x):
return (x - self.mean) / self.std
def decode(self, x):
return x * self.std + self.mean
def make_standardizer(x):
mean = x.mean(0, keepdim=True)
std = x.std(0, keepdim=True).clamp_min(1e-4)
return Standardizer(mean=mean, std=std)
def scatter_2d(x, ax=None, title="", alpha=0.35, s=8, color="#1f77b4"):
if ax is None:
_, ax = plt.subplots()
x = x.detach().cpu()
ax.scatter(x[:, 0], x[:, 1], s=s, alpha=alpha, color=color)
ax.set_title(title)
ax.set_xlabel("$x_1$")
ax.set_ylabel("$x_2$")
return ax
raw_data = sample_two_moons()
standardizer = make_standardizer(raw_data)
train_data = standardizer.encode(raw_data)
fig, axes = plt.subplots(1, 2, figsize=(11, 4))
scatter_2d(raw_data, ax=axes[0], title="Datos originales")
scatter_2d(train_data, ax=axes[1], title="Datos estandarizados")
plt.tight_layout()
plt.show()
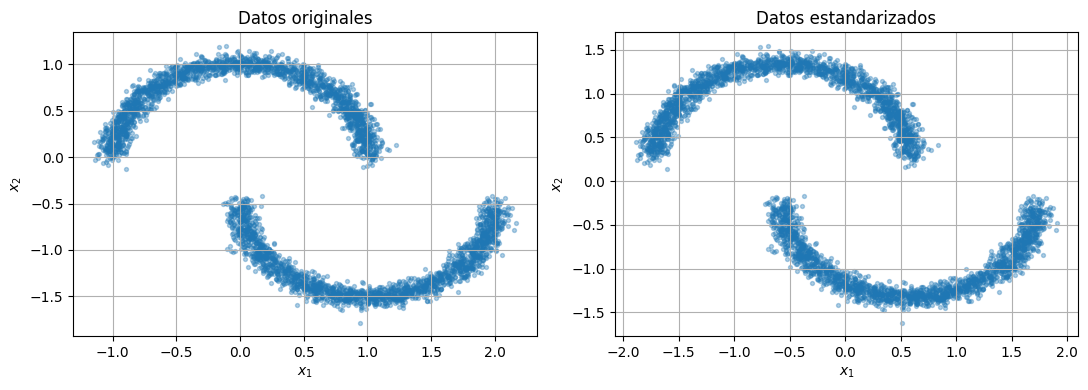
Trabajaremos con este dataset 2D porque permite ver con claridad si el flow aprende una distribucion no gaussiana y con geometria curva.
Procedemos a armar las clases necesarias para armar nuestros NFs.
class MLP(nn.Module):
def __init__(self, in_features, out_features, hidden_features=(64, 64), activation=nn.ReLU):
super().__init__()
dims = [in_features, *hidden_features, out_features]
layers = []
for din, dout in zip(dims[:-2], dims[1:-1]):
layers.append(nn.Linear(din, dout))
layers.append(activation())
layers.append(nn.Linear(dims[-2], dims[-1]))
self.net = nn.Sequential(*layers)
def forward(self, x):
return self.net(x)
class ReversePermutation(nn.Module):
def __init__(self, features):
super().__init__()
self.features = features
def z_to_x(self, z):
return z.flip(-1), torch.zeros(z.size(0), device=z.device)
def x_to_z(self, x):
return x.flip(-1), torch.zeros(x.size(0), device=x.device)
class FlowModel(nn.Module):
def __init__(self, features, layers):
super().__init__()
self.features = features
self.layers = nn.ModuleList(layers)
self.base = torch.distributions.Independent(
torch.distributions.Normal(
loc=torch.zeros(features),
scale=torch.ones(features),
),
1,
)
def base_log_prob(self, z):
base = self.base
if z.device.type != "cpu":
base = torch.distributions.Independent(
torch.distributions.Normal(
loc=torch.zeros(self.features, device=z.device),
scale=torch.ones(self.features, device=z.device),
),
1,
)
return base.log_prob(z)
def sample_base(self, n, device):
return torch.randn(n, self.features, device=device)
def z_to_x(self, z):
x = z
log_det = torch.zeros(z.size(0), device=z.device)
for layer in self.layers:
x, ld = layer.z_to_x(x)
log_det = log_det + ld
return x, log_det
def x_to_z(self, x):
z = x
log_det = torch.zeros(x.size(0), device=x.device)
for layer in reversed(self.layers):
z, ld = layer.x_to_z(z)
log_det = log_det + ld
return z, log_det
def log_prob(self, x):
z, log_det = self.x_to_z(x)
return self.base_log_prob(z) + log_det
@torch.no_grad()
def sample(self, n):
z = self.sample_base(n, next(self.parameters()).device)
x, _ = self.z_to_x(z)
return x
def train_density_model(model, data, epochs=350, batch_size=256, lr=1e-3, verbose_every=50):
model = model.to(DEVICE)
data = data.to(DEVICE)
optimizer = torch.optim.Adam(model.parameters(), lr=lr)
history = []
for epoch in range(1, epochs + 1):
perm = torch.randperm(data.size(0), device=data.device)
total = 0.0
for i in range(0, data.size(0), batch_size):
idx = perm[i : i + batch_size]
batch = data[idx]
loss = -model.log_prob(batch).mean()
optimizer.zero_grad()
loss.backward()
optimizer.step()
total += loss.item() * batch.size(0)
mean_loss = total / data.size(0)
history.append(mean_loss)
if epoch % verbose_every == 0 or epoch == 1:
print(f"epoch={epoch:4d} nll={mean_loss:.4f}")
return history
def train_zuko_flow(flow, data, epochs=350, batch_size=256, lr=1e-3, verbose_every=50):
flow = flow.to(DEVICE)
data = data.to(DEVICE)
optimizer = torch.optim.Adam(flow.parameters(), lr=lr)
history = []
for epoch in range(1, epochs + 1):
perm = torch.randperm(data.size(0), device=data.device)
total = 0.0
for i in range(0, data.size(0), batch_size):
idx = perm[i : i + batch_size]
batch = data[idx]
dist = flow()
loss = -dist.log_prob(batch).mean()
optimizer.zero_grad()
loss.backward()
optimizer.step()
total += loss.item() * batch.size(0)
mean_loss = total / data.size(0)
history.append(mean_loss)
if epoch % verbose_every == 0 or epoch == 1:
print(f"epoch={epoch:4d} nll={mean_loss:.4f}")
return history
def compare_samples(reference, generated, title_left="Datos", title_right="Muestras"):
fig, axes = plt.subplots(1, 2, figsize=(11, 4))
scatter_2d(reference, ax=axes[0], title=title_left, color="#1f77b4")
scatter_2d(generated, ax=axes[1], title=title_right, color="#d62728")
plt.tight_layout()
plt.show()
def plot_history(history, title="Curva de entrenamiento"):
plt.figure(figsize=(6, 4))
plt.plot(history)
plt.title(title)
plt.xlabel("Epoch")
plt.ylabel("NLL media")
plt.show()
Affine Coupling: RealNVP#
En una coupling layer se divide el vector en dos partes:
una parte queda igual;
la otra se transforma usando parametros que dependen de la primera.
En una version afine:
Ventajas:
la inversa es inmediata;
el jacobiano es triangular;
el costo de
log_probysamplees similar.
Limitacion:
cada capa solo modifica una parte de las variables, asi que suele necesitar varias capas y permutaciones.
class AffineCoupling(nn.Module):
def __init__(self, features, mask, hidden_features=(64, 64)):
super().__init__()
mask = torch.as_tensor(mask, dtype=torch.bool)
if mask.numel() != features:
raise ValueError("La mascara debe tener longitud `features`.")
if mask.sum() == 0 or (~mask).sum() == 0:
raise ValueError("La mascara debe dejar parte fija y parte transformada.")
self.features = features
self.register_buffer("mask", mask)
self.cond_idx = mask
self.trans_idx = ~mask
self.net = MLP(int(mask.sum().item()), 2 * int((~mask).sum().item()), hidden_features)
def _params(self, x_cond):
shift, log_scale = self.net(x_cond).chunk(2, dim=-1)
log_scale = 0.8 * torch.tanh(log_scale)
return shift, log_scale
def z_to_x(self, z):
x = z.clone()
z_cond = z[:, self.cond_idx]
z_trans = z[:, self.trans_idx]
shift, log_scale = self._params(z_cond)
x[:, self.trans_idx] = z_trans * torch.exp(log_scale) + shift
return x, log_scale.sum(dim=-1)
def x_to_z(self, x):
z = x.clone()
x_cond = x[:, self.cond_idx]
x_trans = x[:, self.trans_idx]
shift, log_scale = self._params(x_cond)
z[:, self.trans_idx] = (x_trans - shift) * torch.exp(-log_scale)
return z, -log_scale.sum(dim=-1)
realnvp = FlowModel(
features=2,
layers=[
AffineCoupling(2, mask=[1, 0], hidden_features=(64, 64)),
AffineCoupling(2, mask=[0, 1], hidden_features=(64, 64)),
AffineCoupling(2, mask=[1, 0], hidden_features=(64, 64)),
AffineCoupling(2, mask=[0, 1], hidden_features=(64, 64)),
],
)
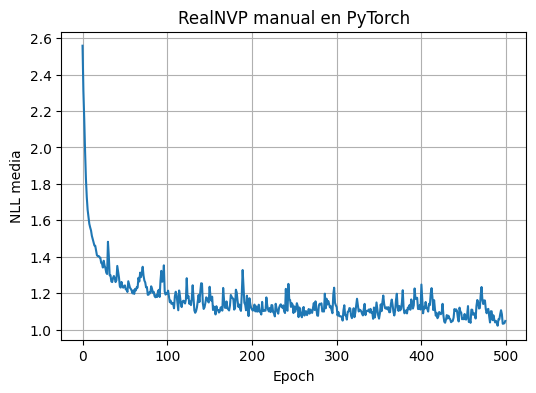
history_realnvp = train_density_model(realnvp, train_data, epochs=500, batch_size=128, lr=5e-4, verbose_every=50)
plot_history(history_realnvp, "RealNVP manual en PyTorch")
epoch= 1 nll=2.5583
epoch= 50 nll=1.2363
epoch= 100 nll=1.2018
epoch= 150 nll=1.1495
epoch= 200 nll=1.1198
epoch= 250 nll=1.0915
epoch= 300 nll=1.1333
epoch= 350 nll=1.0775
epoch= 400 nll=1.1108
epoch= 450 nll=1.0601
epoch= 500 nll=1.0479
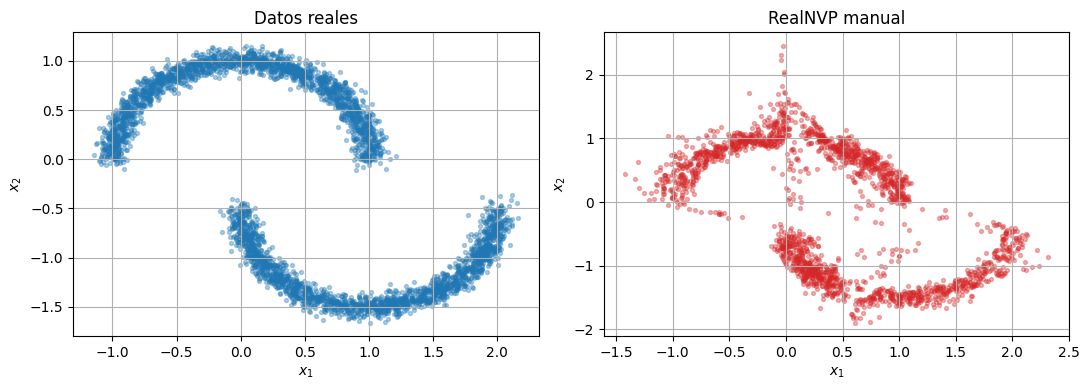
with torch.no_grad():
realnvp_samples = standardizer.decode(realnvp.sample(2000).cpu())
compare_samples(raw_data.cpu(), realnvp_samples, title_left="Datos reales", title_right="RealNVP manual")
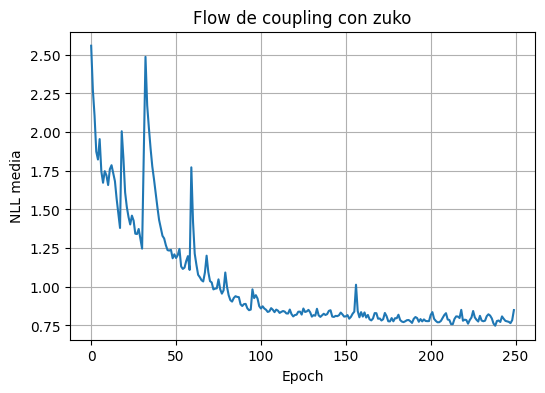
La misma idea usando zuko#
En zuko existen flows de coupling prearmados. Segun la version instalada, puede aparecer RealNVP o una variante basada en coupling afine como NICE.
def make_zuko_coupling(features=2, transforms=4, hidden_features=(64, 64)):
if hasattr(zuko.flows, "RealNVP"):
return zuko.flows.RealNVP(
features=features,
transforms=transforms,
hidden_features=hidden_features,
)
return zuko.flows.NICE(
features=features,
transforms=transforms,
hidden_features=hidden_features,
)
zuko_coupling = make_zuko_coupling()
history_zuko_coupling = train_zuko_flow(
zuko_coupling,
train_data,
epochs=250,
lr=1e-3,
verbose_every=50,
)
plot_history(history_zuko_coupling, "Flow de coupling con zuko")
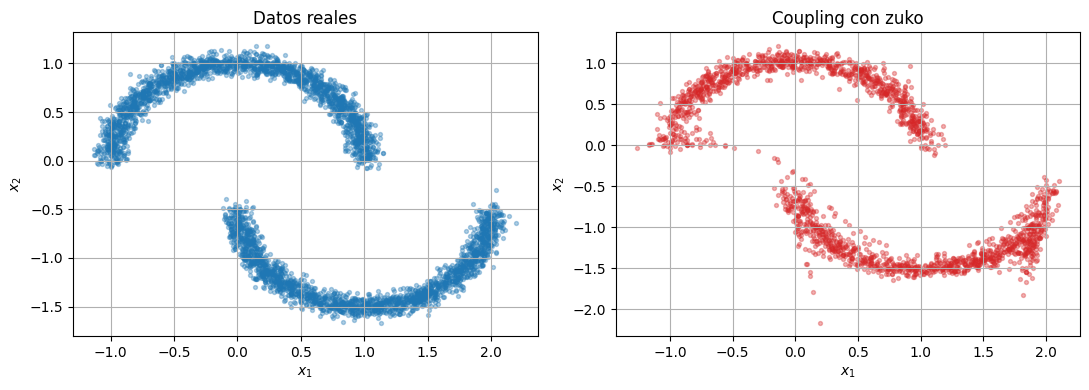
with torch.no_grad():
zuko_coupling_samples = standardizer.decode(zuko_coupling().sample((2000,)).cpu())
compare_samples(raw_data.cpu(), zuko_coupling_samples, title_left="Datos reales", title_right="Coupling con zuko")
epoch= 1 nll=2.5583
epoch= 50 nll=1.2097
epoch= 100 nll=0.8744
epoch= 150 nll=0.8072
epoch= 200 nll=0.7780
epoch= 250 nll=0.8492
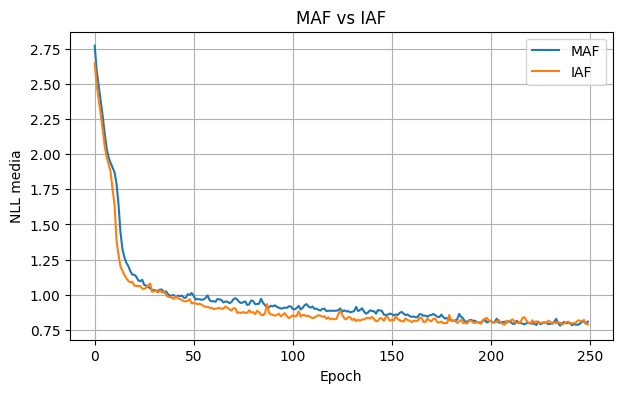
Parte 2#
MAF vs IAF#
Tanto MAF como IAF son flows autoregresivos. La diferencia esta en que direccion usa la parametrizacion autoregresiva.
MAF#
evaluar
log_prob(x)es natural y rapido;muestrear requiere resolver las componentes una por una.
IAF#
muestrear es natural y rapido;
evaluar
log_prob(x)requiere invertir secuencialmente.
En alta dimension, ese intercambio importa mucho:
MAF se usa mucho para density estimation;
IAF se usa mucho para amortized variational inference, donde interesa samplear rapido.
class MaskedLinear(nn.Linear):
def __init__(self, in_features, out_features, mask):
super().__init__(in_features, out_features)
self.register_buffer("mask", mask)
def forward(self, x):
return F.linear(x, self.weight * self.mask, self.bias)
class MADE(nn.Module):
def __init__(self, features, hidden_features=(64, 64), out_multiplier=2):
super().__init__()
if features < 2:
raise ValueError("Para esta demo usamos features >= 2.")
input_degrees = torch.arange(1, features + 1)
hidden_degrees = []
for width in hidden_features:
deg = torch.arange(width) % (features - 1) + 1
hidden_degrees.append(deg)
layers = []
prev_features = features
prev_degrees = input_degrees
for width, deg in zip(hidden_features, hidden_degrees):
mask = (deg[:, None] >= prev_degrees[None, :]).float()
layers.append(MaskedLinear(prev_features, width, mask))
layers.append(nn.ReLU())
prev_features = width
prev_degrees = deg
out_degrees = input_degrees.repeat(out_multiplier)
out_mask = (out_degrees[:, None] > prev_degrees[None, :]).float()
layers.append(MaskedLinear(prev_features, features * out_multiplier, out_mask))
self.net = nn.Sequential(*layers)
def forward(self, x):
return self.net(x)
class MAFBlock(nn.Module):
def __init__(self, features, hidden_features=(64, 64)):
super().__init__()
self.features = features
self.net = MADE(features, hidden_features=hidden_features, out_multiplier=2)
def _params(self, x):
shift, log_scale = self.net(x).chunk(2, dim=-1)
log_scale = 0.6 * torch.tanh(log_scale)
return shift, log_scale
def x_to_z(self, x):
shift, log_scale = self._params(x)
z = (x - shift) * torch.exp(-log_scale)
return z, -log_scale.sum(dim=-1)
def z_to_x(self, z):
x = torch.zeros_like(z)
log_det = torch.zeros(z.size(0), device=z.device)
for i in range(self.features):
shift, log_scale = self._params(x)
# Evitamos una actualizacion inplace para no romper autograd.
x = x.clone()
x[:, i] = z[:, i] * torch.exp(log_scale[:, i]) + shift[:, i]
log_det = log_det + log_scale[:, i]
return x, log_det
class IAFBlock(nn.Module):
def __init__(self, features, hidden_features=(64, 64)):
super().__init__()
self.features = features
self.net = MADE(features, hidden_features=hidden_features, out_multiplier=2)
def _params(self, z):
shift, log_scale = self.net(z).chunk(2, dim=-1)
log_scale = 0.6 * torch.tanh(log_scale)
return shift, log_scale
def z_to_x(self, z):
shift, log_scale = self._params(z)
x = z * torch.exp(log_scale) + shift
return x, log_scale.sum(dim=-1)
def x_to_z(self, x):
z = torch.zeros_like(x)
log_det = torch.zeros(x.size(0), device=x.device)
for i in range(self.features):
shift, log_scale = self._params(z)
# Evitamos una actualizacion inplace para no romper autograd.
z = z.clone()
z[:, i] = (x[:, i] - shift[:, i]) * torch.exp(-log_scale[:, i])
log_det = log_det - log_scale[:, i]
return z, log_det
maf = FlowModel(
features=2,
layers=[
MAFBlock(2, hidden_features=(64, 64)),
ReversePermutation(2),
MAFBlock(2, hidden_features=(64, 64)),
ReversePermutation(2),
MAFBlock(2, hidden_features=(64, 64)),
],
)
iaf = FlowModel(
features=2,
layers=[
IAFBlock(2, hidden_features=(64, 64)),
ReversePermutation(2),
IAFBlock(2, hidden_features=(64, 64)),
ReversePermutation(2),
IAFBlock(2, hidden_features=(64, 64)),
],
)
history_maf = train_density_model(maf, train_data, epochs=250, lr=1e-3, verbose_every=50)
history_iaf = train_density_model(iaf, train_data, epochs=250, lr=1e-3, verbose_every=50)
plt.figure(figsize=(7, 4))
plt.plot(history_maf, label="MAF")
plt.plot(history_iaf, label="IAF")
plt.title("MAF vs IAF")
plt.xlabel("Epoch")
plt.ylabel("NLL media")
plt.legend()
plt.show()
epoch= 1 nll=2.7719
epoch= 50 nll=1.0118
epoch= 100 nll=0.9170
epoch= 150 nll=0.8655
epoch= 200 nll=0.8095
epoch= 250 nll=0.8084
epoch= 1 nll=2.6495
epoch= 50 nll=0.9380
epoch= 100 nll=0.8408
epoch= 150 nll=0.8134
epoch= 200 nll=0.8151
epoch= 250 nll=0.7890
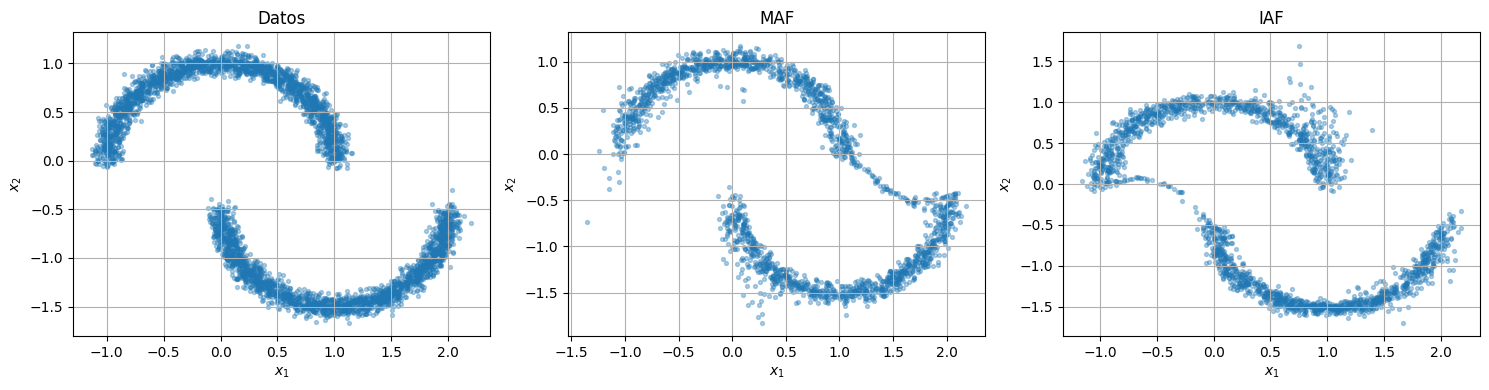
with torch.no_grad():
maf_samples = standardizer.decode(maf.sample(2000).cpu())
iaf_samples = standardizer.decode(iaf.sample(2000).cpu())
fig, axes = plt.subplots(1, 3, figsize=(15, 4))
scatter_2d(raw_data.cpu(), ax=axes[0], title="Datos")
scatter_2d(maf_samples, ax=axes[1], title="MAF")
scatter_2d(iaf_samples, ax=axes[2], title="IAF")
plt.tight_layout()
plt.show()
Benchmark conceptual: quien gana al samplear y quien gana al evaluar densidad#
En 2D la diferencia puede ser pequena. Para verla mejor, hacemos un micro-benchmark con 16 dimensiones y pesos aleatorios. No nos interesa la calidad del ajuste sino el costo computacional de cada direccion.
def benchmark_model(model, features=16, batch=1024, repeats=40):
model = model.to(DEVICE)
x = torch.randn(batch, features, device=DEVICE)
with torch.no_grad():
_ = model.log_prob(x)
_ = model.sample(batch)
t0 = time.perf_counter()
for _ in range(repeats):
_ = model.log_prob(x)
t_logprob = time.perf_counter() - t0
t0 = time.perf_counter()
for _ in range(repeats):
_ = model.sample(batch)
t_sample = time.perf_counter() - t0
return t_logprob, t_sample
maf16 = FlowModel(
features=16,
layers=[MAFBlock(16, hidden_features=(128, 128)), ReversePermutation(16), MAFBlock(16, hidden_features=(128, 128))],
)
iaf16 = FlowModel(
features=16,
layers=[IAFBlock(16, hidden_features=(128, 128)), ReversePermutation(16), IAFBlock(16, hidden_features=(128, 128))],
)
maf_logprob, maf_sample = benchmark_model(maf16, features=16)
iaf_logprob, iaf_sample = benchmark_model(iaf16, features=16)
print(f"MAF -> log_prob: {maf_logprob:.3f}s sample: {maf_sample:.3f}s")
print(f"IAF -> log_prob: {iaf_logprob:.3f}s sample: {iaf_sample:.3f}s")
MAF -> log_prob: 0.030s sample: 0.710s
IAF -> log_prob: 0.577s sample: 0.049s
Lo que deberiamos observar es:
MAF:
log_probrelativamente rapido ysamplemas caro.IAF:
samplerelativamente rapido ylog_probmas caro.
Esa es la diferencia estructural importante entre ambos.
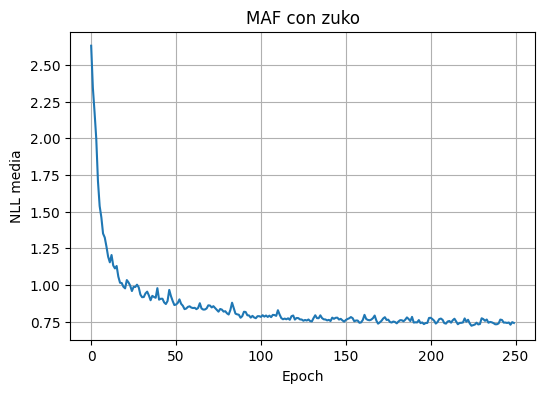
zuko_maf = zuko.flows.MAF(
features=2,
transforms=4,
hidden_features=(64, 64),
)
history_zuko_maf = train_zuko_flow(zuko_maf, train_data, epochs=250, lr=1e-3, verbose_every=50)
plot_history(history_zuko_maf, "MAF con zuko")
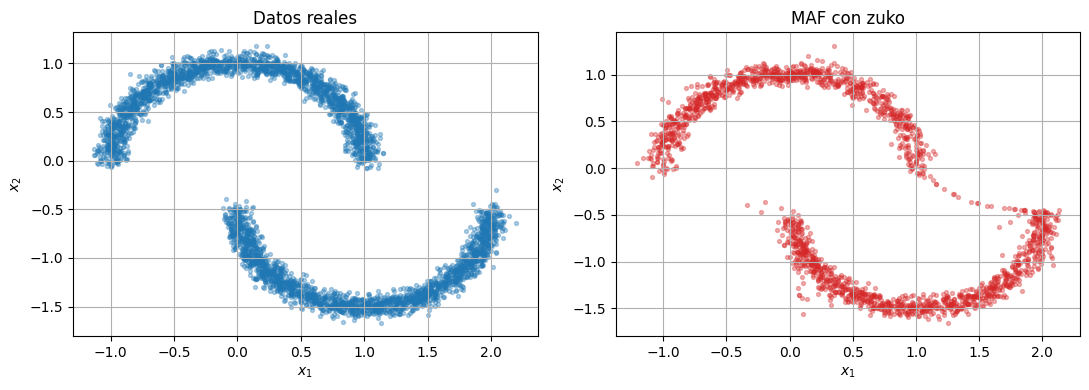
with torch.no_grad():
zuko_maf_samples = standardizer.decode(zuko_maf().sample((2000,)).cpu())
compare_samples(raw_data.cpu(), zuko_maf_samples, title_left="Datos reales", title_right="MAF con zuko")
epoch= 1 nll=2.6316
epoch= 50 nll=0.8634
epoch= 100 nll=0.7873
epoch= 150 nll=0.7501
epoch= 200 nll=0.7751
epoch= 250 nll=0.7413
Parte 3#
Continuous Normalizing Flows (CNF)#
En un CNF no apilamos un numero finito de capas discretas. En cambio, definimos una dinamica continua:
El dato final \(x(1)\) se obtiene integrando una ODE desde \(x(0) = z\).
La densidad tambien evoluciona de forma continua:
los flows discretos deforman el espacio con una secuencia de mapas;
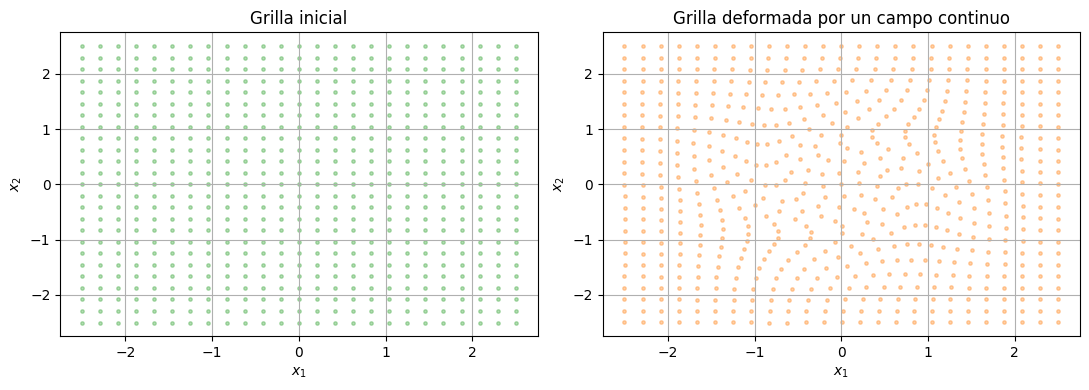
un CNF lo deforma con un campo de velocidades.
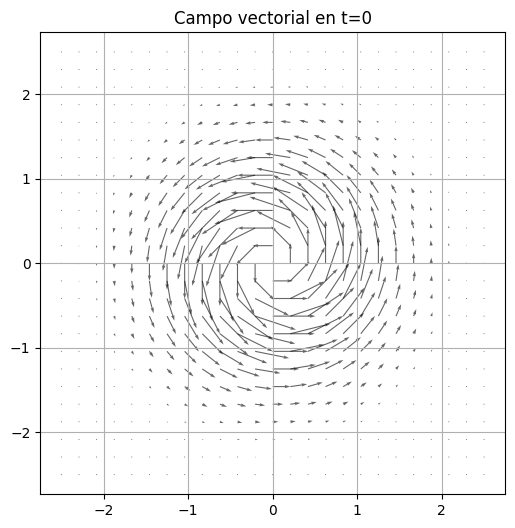
Para entender como deforma el espacio un campo vectorial, tomemos un ejemplo simple
def vector_field(x, t):
angle = 1.8 * torch.exp(-((x**2).sum(dim=-1, keepdim=True))) # decaimiento exponencial
rot = torch.cat([-x[:, 1:2], x[:, 0:1]], dim=1) # rotacion 90 grados
return angle * rot + 0.15 * torch.sin(2 * math.pi * t) * x
def rk4_step(x, t, dt, field):
k1 = field(x, t)
k2 = field(x + 0.5 * dt * k1, t + 0.5 * dt)
k3 = field(x + 0.5 * dt * k2, t + 0.5 * dt)
k4 = field(x + dt * k3, t + dt)
return x + (dt / 6.0) * (k1 + 2*k2 + 2*k3 + k4)
def integrate_field(x0, steps=80):
x = x0.clone()
ts = torch.linspace(0.0, 1.0, steps + 1, device=x0.device)
dt = 1.0 / steps
for t in ts[:-1]:
x = rk4_step(x, t, dt, vector_field)
return x
grid_1d = torch.linspace(-2.5, 2.5, 25, device=DEVICE)
gx, gy = torch.meshgrid(grid_1d, grid_1d, indexing="xy")
grid = torch.stack([gx.reshape(-1), gy.reshape(-1)], dim=1)
deformed = integrate_field(grid)
fig, axes = plt.subplots(1, 2, figsize=(11, 4))
scatter_2d(grid.cpu(), ax=axes[0], title="Grilla inicial", alpha=0.35, s=6, color="#2ca02c")
scatter_2d(deformed.cpu(), ax=axes[1], title="Grilla deformada por un campo continuo", alpha=0.35, s=6, color="#ff7f0e")
plt.tight_layout()
plt.show()
x = grid
t0 = torch.tensor(0.0, device=DEVICE)
v = vector_field(x, t0)
plt.figure(figsize=(6,6))
plt.quiver(
x[:,0].cpu(),
x[:,1].cpu(),
v[:,0].cpu(),
v[:,1].cpu(),
alpha=0.6
)
plt.title("Campo vectorial en t=0")
plt.axis("equal")
plt.show()
Para resolverlo, lo haremos unicamente con zuko por su simplicidad
zuko_cnf = zuko.flows.CNF(
features=2,
hidden_features=(64, 64),
atol=1e-5,
rtol=1e-5,
)
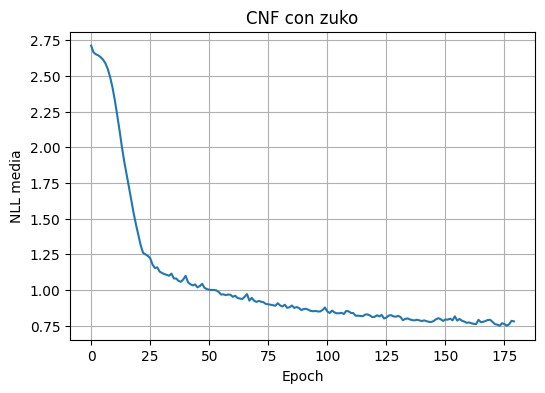
history_cnf = train_zuko_flow(zuko_cnf, train_data, epochs=180, lr=1e-3, verbose_every=30)
plot_history(history_cnf, "CNF con zuko")
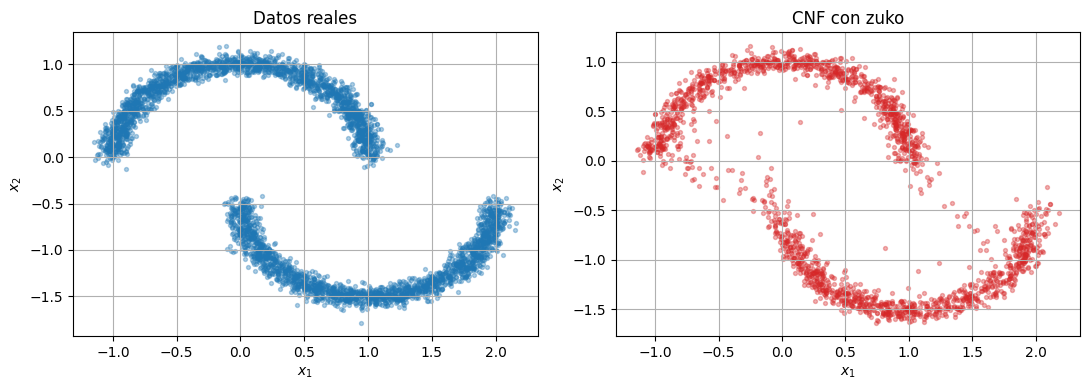
with torch.no_grad():
cnf_samples = standardizer.decode(zuko_cnf().sample((2000,)).cpu())
compare_samples(raw_data.cpu(), cnf_samples, title_left="Datos reales", title_right="CNF con zuko")
epoch= 1 nll=2.7126
epoch= 30 nll=1.1291
epoch= 60 nll=0.9667
epoch= 90 nll=0.8599
epoch= 120 nll=0.8104
epoch= 150 nll=0.7832
epoch= 180 nll=0.7802
import numpy as np
# Define a grid for contour plotting
x1 = np.linspace(-3, 3, 100)
x2 = np.linspace(-3, 3, 100)
X1, X2 = np.meshgrid(x1, x2)
grid_points = torch.tensor(np.stack([X1.ravel(), X2.ravel()], axis=1), dtype=torch.float32, device=DEVICE)
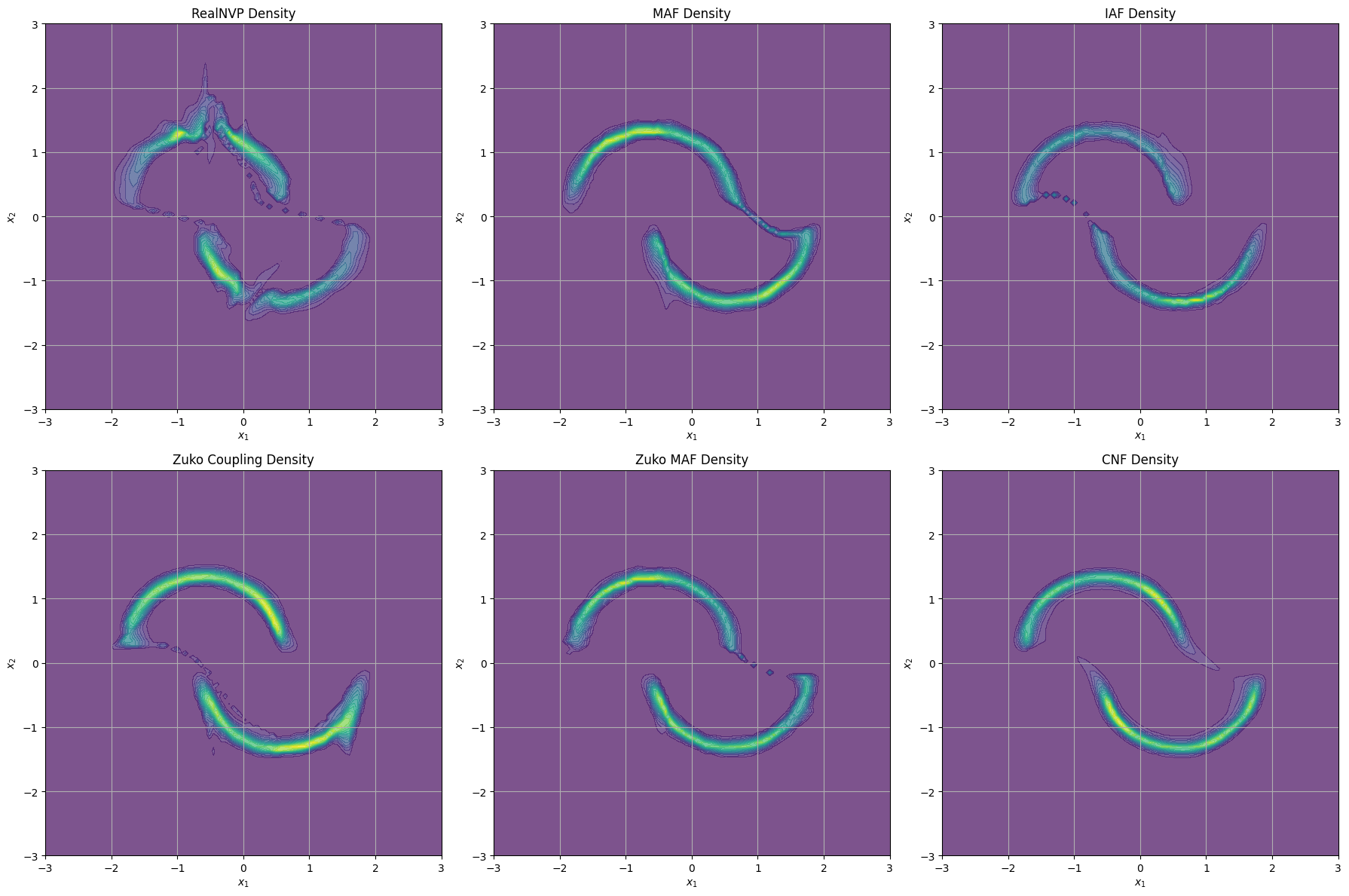
# Function to plot contour for a model
def plot_contour(model, title, ax):
with torch.no_grad():
log_probs = model.log_prob(grid_points).cpu().numpy().reshape(X1.shape)
ax.contourf(X1, X2, np.exp(log_probs), levels=20, cmap='viridis', alpha=0.7)
ax.set_title(title)
ax.set_xlabel('$x_1$')
ax.set_ylabel('$x_2$')
# Plot contours for different models
fig, axes = plt.subplots(2, 3, figsize=(18, 12))
# RealNVP
plot_contour(realnvp, 'RealNVP Density', axes[0, 0])
# MAF
plot_contour(maf, 'MAF Density', axes[0, 1])
# IAF
plot_contour(iaf, 'IAF Density', axes[0, 2])
# Zuko Coupling
with torch.no_grad():
log_probs_zuko_coupling = zuko_coupling().log_prob(grid_points).cpu().numpy().reshape(X1.shape)
axes[1, 0].contourf(X1, X2, np.exp(log_probs_zuko_coupling), levels=20, cmap='viridis', alpha=0.7)
axes[1, 0].set_title('Zuko Coupling Density')
axes[1, 0].set_xlabel('$x_1$')
axes[1, 0].set_ylabel('$x_2$')
# Zuko MAF
with torch.no_grad():
log_probs_zuko_maf = zuko_maf().log_prob(grid_points).cpu().numpy().reshape(X1.shape)
axes[1, 1].contourf(X1, X2, np.exp(log_probs_zuko_maf), levels=20, cmap='viridis', alpha=0.7)
axes[1, 1].set_title('Zuko MAF Density')
axes[1, 1].set_xlabel('$x_1$')
axes[1, 1].set_ylabel('$x_2$')
# CNF
with torch.no_grad():
log_probs_cnf = zuko_cnf().log_prob(grid_points).cpu().numpy().reshape(X1.shape)
axes[1, 2].contourf(X1, X2, np.exp(log_probs_cnf), levels=20, cmap='viridis', alpha=0.7)
axes[1, 2].set_title('CNF Density')
axes[1, 2].set_xlabel('$x_1$')
axes[1, 2].set_ylabel('$x_2$')
plt.tight_layout()
plt.show()