Mixture Density Networks con PyTorch#
![]()
En esta notebook vamos a construir una Mixture Density Network (MDN) para modelar la distribución condicional de la sensación térmica a partir de variables meteorológicas.
Trabajaremos con el dataset de ejemplo:
weather_dataset_example.csv
Objetivos de aprendizaje:
entender qué significa modelar una distribución condicional
p(y|x);implementar una MDN en PyTorch;
entrenar el modelo maximizando verosimilitud;
interpretar medias, desvíos y pesos de mezcla.
Introducción#
En una regresión estándar, una red neuronal suele devolver un único valor para cada entrada x.
Una MDN, en cambio, devuelve los parámetros de una mezcla de gaussianas:
Para cada dato de entrada, la red aprende:
\(K\) pesos de mezcla \(\pi_k(x)\) que suman 1;
\(K\) medias \(\mu_k(x)\);
\(K\) desvíos estándar \(\sigma_k(x) > 0\).
Esto permite describir situaciones donde una misma entrada puede estar asociada a varios valores plausibles de salida, o donde la incertidumbre cambia con \(x\).
en la fórmula de la gaussiana, la dimensión \(c\) es la dimensión de la variable de salida, no un valor fijo igual a 2;
para que \(\pi_k\) sume 1 usamos
softmax.para forzar \(\sigma_k > 0\) usaremos
softplusen lugar deexp, porque suele ser más estable numéricamente.
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import torch
from torch import nn
from torch.utils.data import DataLoader, TensorDataset
SEED = 42
np.random.seed(SEED)
torch.manual_seed(SEED)
if torch.cuda.is_available():
torch.cuda.manual_seed_all(SEED)
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"Dispositivo: {device}")
Dispositivo: cpu
Carga de datos#
El dataset contiene 7 variables meteorológicas:
temperatureapparent_temperaturehumiditywind_speedwind_bearingvisibilitypressure
Vamos a usar como objetivo la variable apparent_temperature y como entradas las otras 6 columnas.
url = "https://raw.githubusercontent.com/pandego/mdn-playground/refs/heads/main/data/01_raw/weather_dataset/weather_dataset_example.csv"
data = pd.read_csv(url, delimiter=";")
print(data.shape)
data.head()
(96453, 7)
| temperature | apparent_temperature | humidity | wind_speed | wind_bearing | visibility | pressure | |
|---|---|---|---|---|---|---|---|
| 0 | 9.472222 | 7.388889 | 0.89 | 14.1197 | 251.0 | 15.8263 | 1015.13 |
| 1 | 9.355556 | 7.227778 | 0.86 | 14.2646 | 259.0 | 15.8263 | 1015.63 |
| 2 | 9.377778 | 9.377778 | 0.89 | 3.9284 | 204.0 | 14.9569 | 1015.94 |
| 3 | 8.288889 | 5.944444 | 0.83 | 14.1036 | 269.0 | 15.8263 | 1016.41 |
| 4 | 8.755556 | 6.977778 | 0.83 | 11.0446 | 259.0 | 15.8263 | 1016.51 |
print("Valores faltantes por columna:")
display(data.isna().sum().to_frame("faltantes").T)
display(data.describe())
Valores faltantes por columna:
| temperature | apparent_temperature | humidity | wind_speed | wind_bearing | visibility | pressure | |
|---|---|---|---|---|---|---|---|
| faltantes | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| temperature | apparent_temperature | humidity | wind_speed | wind_bearing | visibility | pressure | |
|---|---|---|---|---|---|---|---|
| count | 96453.000000 | 96453.000000 | 96453.000000 | 96453.000000 | 96453.000000 | 96453.000000 | 96453.000000 |
| mean | 11.932678 | 10.855029 | 0.734899 | 10.810640 | 187.509232 | 10.347325 | 1003.235956 |
| std | 9.551546 | 10.696847 | 0.195473 | 6.913571 | 107.383428 | 4.192123 | 116.969906 |
| min | -21.822222 | -27.716667 | 0.000000 | 0.000000 | 0.000000 | 0.000000 | 0.000000 |
| 25% | 4.688889 | 2.311111 | 0.600000 | 5.828200 | 116.000000 | 8.339800 | 1011.900000 |
| 50% | 12.000000 | 12.000000 | 0.780000 | 9.965900 | 180.000000 | 10.046400 | 1016.450000 |
| 75% | 18.838889 | 18.838889 | 0.890000 | 14.135800 | 290.000000 | 14.812000 | 1021.090000 |
| max | 39.905556 | 39.344444 | 1.000000 | 63.852600 | 359.000000 | 16.100000 | 1046.380000 |
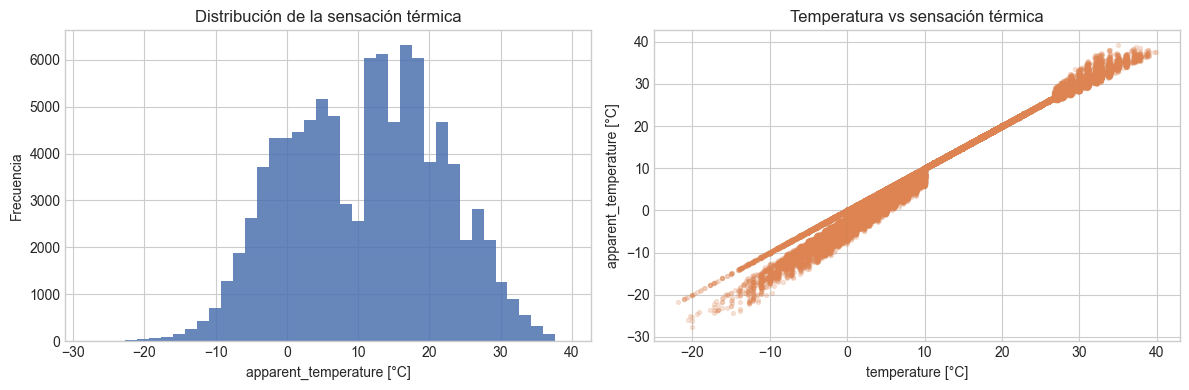
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].hist(data["apparent_temperature"], bins=40, color="#4C72B0", alpha=0.85)
axes[0].set_title("Distribución de la sensación térmica")
axes[0].set_xlabel("apparent_temperature [°C]")
axes[0].set_ylabel("Frecuencia")
axes[1].scatter(
data["temperature"],
data["apparent_temperature"],
s=8,
alpha=0.2,
color="#DD8452",
)
axes[1].set_title("Temperatura vs sensación térmica")
axes[1].set_xlabel("temperature [°C]")
axes[1].set_ylabel("apparent_temperature [°C]")
plt.tight_layout()
plt.show()
Separación en entrenamiento, validación y prueba#
Vamos a separar los datos y luego estandarizarlos . La secuencia que haremos sera
separar
train,validationytest;calcular media y desvío estándar usando sólo
train;estandarizar
validationytestcon esas mismas estadísticas.
Además, también vamos a estandarizar la variable objetivo y, porque en MDN esto suele ayudar bastante a la estabilidad numérica.
feature_cols = [c for c in data.columns if c != "apparent_temperature"]
target_col = "apparent_temperature"
print(f"Características: {feature_cols}")
X = torch.tensor(data[feature_cols].to_numpy(dtype=np.float32))
y = torch.tensor(data[[target_col]].to_numpy(dtype=np.float32))
def compute_standardization_stats(tensor):
mean = tensor.mean(dim=0, keepdim=True)
std = tensor.std(dim=0, unbiased=False, keepdim=True)
std = torch.where(std < 1e-6, torch.ones_like(std), std)
return mean, std
def standardize(tensor, mean, std):
return (tensor - mean) / std
def destandardize(tensor, mean, std):
return tensor * std + mean
num_samples = X.shape[0]
perm = torch.randperm(num_samples)
n_train = int(0.70 * num_samples)
n_val = int(0.20 * num_samples)
train_idx = perm[:n_train]
val_idx = perm[n_train:n_train + n_val]
test_idx = perm[n_train + n_val:]
X_train_raw, y_train_raw = X[train_idx], y[train_idx]
X_val_raw, y_val_raw = X[val_idx], y[val_idx]
X_test_raw, y_test_raw = X[test_idx], y[test_idx]
x_mean, x_std = compute_standardization_stats(X_train_raw)
y_mean, y_std = compute_standardization_stats(y_train_raw)
X_train = standardize(X_train_raw, x_mean, x_std)
X_val = standardize(X_val_raw, x_mean, x_std)
X_test = standardize(X_test_raw, x_mean, x_std)
y_train = standardize(y_train_raw, y_mean, y_std)
y_val = standardize(y_val_raw, y_mean, y_std)
y_test = standardize(y_test_raw, y_mean, y_std)
print(f"Train: {tuple(X_train.shape)}, {tuple(y_train.shape)}")
print(f"Val: {tuple(X_val.shape)}, {tuple(y_val.shape)}")
print(f"Test: {tuple(X_test.shape)}, {tuple(y_test.shape)}")
Características: ['temperature', 'humidity', 'wind_speed', 'wind_bearing', 'visibility', 'pressure']
Train: (67517, 6), (67517, 1)
Val: (19290, 6), (19290, 1)
Test: (9646, 6), (9646, 1)
Dataset y DataLoaders#
Definimos un Dataset simple para usar los datos con PyTorch.
batch_size = 256
train_dataset = TensorDataset(X_train, y_train)
val_dataset = TensorDataset(X_val, y_val)
test_dataset = TensorDataset(X_test, y_test)
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
val_loader = DataLoader(val_dataset, batch_size=batch_size, shuffle=False)
test_loader = DataLoader(test_dataset, batch_size=batch_size, shuffle=False)
print(f"Batches de entrenamiento: {len(train_loader)}")
Batches de entrenamiento: 264
Implementación de la MDN#
La red tendrá un tronco MLP y tres cabezas de salida:
logits_pi: pesos de mezcla antes de aplicarsoftmax;mu: medias de cada componente;sigma: desvíos estándar positivos.
En esta notebook usamos una salida unidimensional (y es la sensación térmica), pero el código está preparado para extenderse a salidas de mayor dimensión.
class MDN(nn.Module):
def __init__(self, dim_entrada, dim_salida=1, num_mezclas=5, num_ocultas=64):
super().__init__()
self.dim_salida = dim_salida
self.num_mezclas = num_mezclas
self.backbone = nn.Sequential(
nn.Linear(dim_entrada, num_ocultas),
nn.ReLU(),
nn.Linear(num_ocultas, num_ocultas),
nn.ReLU(),
)
self.pi_head = nn.Linear(num_ocultas, num_mezclas)
self.mu_head = nn.Linear(num_ocultas, num_mezclas * dim_salida)
self.sigma_head = nn.Linear(num_ocultas, num_mezclas * dim_salida)
def forward(self, x):
h = self.backbone(x)
logits_pi = self.pi_head(h)
mu = self.mu_head(h).view(-1, self.num_mezclas, self.dim_salida)
sigma = torch.nn.functional.softplus(
self.sigma_head(h)
).view(-1, self.num_mezclas, self.dim_salida) + 1e-3
return logits_pi, mu, sigma
6. Función de costo: negativo de la log-verosimilitud#
Queremos maximizar la verosimilitud del modelo. Equivalente a eso, minimizamos el negativo del logaritmo de la verosimilitud.
Una implementación ingenua podría calcular probabilidades, exponenciales y logaritmos por separado, pero eso suele ser inestable. En cambio, usamos una versión basada en logsumexp, que es mucho más robusta.
Si y es un escalar, la pérdida para un batch es
def mdn_nll(logits_pi, mu, sigma, y):
"""
logits_pi: [B, K]
mu: [B, K, D]
sigma: [B, K, D]
y: [B, D]
"""
y = y.unsqueeze(1).expand_as(mu)
comp = torch.distributions.Normal(loc=mu, scale=sigma)
comp_log_prob = comp.log_prob(y).sum(dim=-1) # [B, K]
log_pi = torch.log_softmax(logits_pi, dim=-1)
log_prob = torch.logsumexp(log_pi + comp_log_prob, dim=-1)
return -log_prob.mean()
def mdn_mean(logits_pi, mu):
pi = torch.softmax(logits_pi, dim=-1).unsqueeze(-1)
return (pi * mu).sum(dim=1)
def mdn_sample(logits_pi, mu, sigma):
pi = torch.softmax(logits_pi, dim=-1)
cat = torch.distributions.Categorical(probs=pi)
k = cat.sample()
batch_idx = torch.arange(mu.size(0), device=mu.device)
mu_k = mu[batch_idx, k]
sigma_k = sigma[batch_idx, k]
normal = torch.distributions.Normal(mu_k, sigma_k)
return normal.sample()
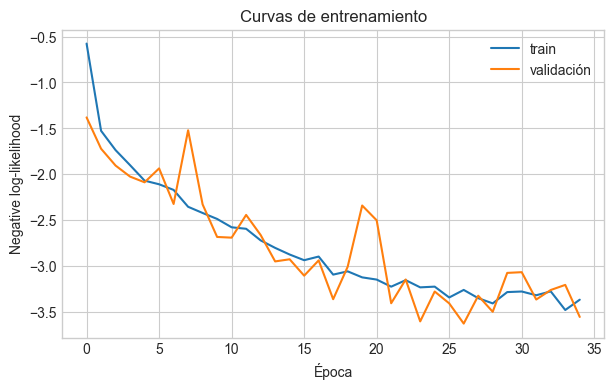
7. Entrenamiento#
Usaremos:
optimizador
Adam;validación al final de cada época;
early stoppingpara quedarnos con el mejor modelo en validación;gradient clippingpara evitar gradientes demasiado grandes.
model = MDN(dim_entrada=X_train.shape[1], dim_salida=1, num_mezclas=5, num_ocultas=64).to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=1e-3, weight_decay=1e-5)
num_epocas = 40
patience = 8
mejor_val = float("inf")
mejor_estado = None
espera = 0
hist_train = []
hist_val = []
for epoca in range(1, num_epocas + 1):
model.train()
train_loss = 0.0
for xb, yb in train_loader:
xb = xb.to(device)
yb = yb.to(device)
optimizer.zero_grad()
logits_pi, mu, sigma = model(xb)
loss = mdn_nll(logits_pi, mu, sigma, yb)
loss.backward()
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=5.0)
optimizer.step()
train_loss += loss.item() * xb.size(0)
train_loss /= len(train_loader.dataset)
hist_train.append(train_loss)
model.eval()
val_loss = 0.0
with torch.no_grad():
for xb, yb in val_loader:
xb = xb.to(device)
yb = yb.to(device)
logits_pi, mu, sigma = model(xb)
loss = mdn_nll(logits_pi, mu, sigma, yb)
val_loss += loss.item() * xb.size(0)
val_loss /= len(val_loader.dataset)
hist_val.append(val_loss)
if val_loss < mejor_val - 1e-4:
mejor_val = val_loss
mejor_estado = model.state_dict().copy()
espera = 0
else:
espera += 1
if epoca == 1 or epoca % 5 == 0:
print(f"Época {epoca:02d} | train NLL = {train_loss:.4f} | val NLL = {val_loss:.4f}")
if espera >= patience:
print(f"Early stopping en la época {epoca}.")
break
if mejor_estado is not None:
model.load_state_dict(mejor_estado)
Época 01 | train NLL = -0.5757 | val NLL = -1.3810
Época 05 | train NLL = -2.0708 | val NLL = -2.0887
Época 10 | train NLL = -2.4883 | val NLL = -2.6847
Época 15 | train NLL = -2.8762 | val NLL = -2.9283
Época 20 | train NLL = -3.1255 | val NLL = -2.3419
Época 25 | train NLL = -3.2266 | val NLL = -3.2799
Época 30 | train NLL = -3.2861 | val NLL = -3.0767
Época 35 | train NLL = -3.3690 | val NLL = -3.5572
Early stopping en la época 35.
plt.figure(figsize=(7, 4))
plt.plot(hist_train, label="train")
plt.plot(hist_val, label="validación")
plt.xlabel("Época")
plt.ylabel("Negative log-likelihood")
plt.title("Curvas de entrenamiento")
plt.legend()
plt.show()
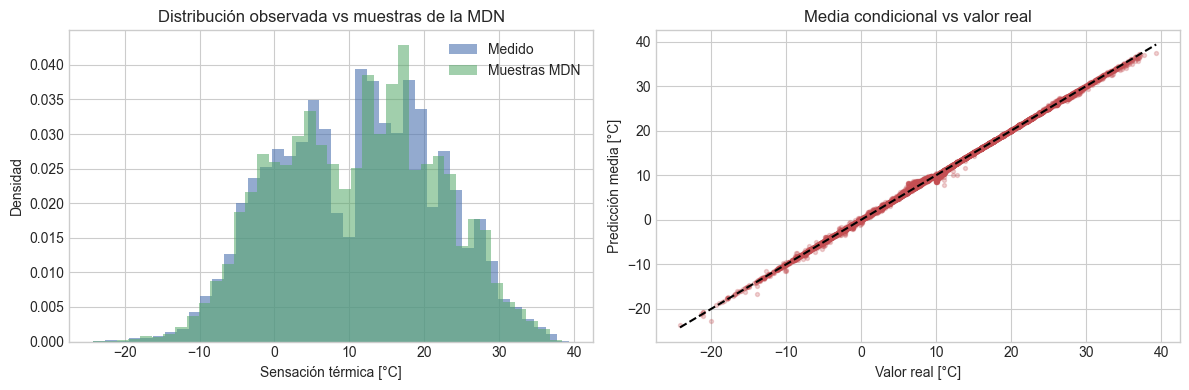
8. Evaluación sobre el conjunto de prueba#
Hay varias maneras de resumir la predicción de una MDN.
Dos opciones frecuentes son:
media condicional:
E[y|x] = \sum_k \pi_k \mu_k;muestra de la mezcla: primero elegimos una componente según
\pi, luego muestreamos una normal.
La media condicional es útil si queremos comparar contra una regresión clásica. La muestra es útil si queremos generar salidas plausibles de acuerdo con la incertidumbre del modelo.
model.eval()
y_true_scaled = []
y_pred_mean_scaled = []
y_pred_sample_scaled = []
test_nll = 0.0
with torch.no_grad():
for xb, yb in test_loader:
xb = xb.to(device)
yb = yb.to(device)
logits_pi, mu, sigma = model(xb)
loss = mdn_nll(logits_pi, mu, sigma, yb)
test_nll += loss.item() * xb.size(0)
y_mean_pred = mdn_mean(logits_pi, mu)
y_sample_pred = mdn_sample(logits_pi, mu, sigma)
y_true_scaled.append(yb.cpu())
y_pred_mean_scaled.append(y_mean_pred.cpu())
y_pred_sample_scaled.append(y_sample_pred.cpu())
test_nll /= len(test_loader.dataset)
y_true_scaled = torch.cat(y_true_scaled, dim=0)
y_pred_mean_scaled = torch.cat(y_pred_mean_scaled, dim=0)
y_pred_sample_scaled = torch.cat(y_pred_sample_scaled, dim=0)
y_true = destandardize(y_true_scaled, y_mean, y_std).numpy().ravel()
y_pred_mean = destandardize(y_pred_mean_scaled, y_mean, y_std).numpy().ravel()
y_pred_sample = destandardize(y_pred_sample_scaled, y_mean, y_std).numpy().ravel()
rmse = np.sqrt(np.mean((y_true - y_pred_mean) ** 2))
mae = np.mean(np.abs(y_true - y_pred_mean))
print(f"Test NLL (escala estandarizada): {test_nll:.4f}")
print(f"RMSE usando la media condicional: {rmse:.3f} °C")
print(f"MAE usando la media condicional: {mae:.3f} °C")
Test NLL (escala estandarizada): -3.5570
RMSE usando la media condicional: 0.230 °C
MAE usando la media condicional: 0.117 °C
Observación: la NLL puede resultar incluso negativa. Eso no es un error. Las densidades continuas no están acotadas por 1, así que su logaritmo puede ser positivo en algunas regiones.
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].hist(y_true, bins=40, density=True, alpha=0.60, label="Medido", color="#4C72B0")
axes[0].hist(y_pred_sample, bins=40, density=True, alpha=0.55, label="Muestras MDN", color="#55A868")
axes[0].set_title("Distribución observada vs muestras de la MDN")
axes[0].set_xlabel("Sensación térmica [°C]")
axes[0].set_ylabel("Densidad")
axes[0].legend()
axes[1].scatter(y_true, y_pred_mean, s=8, alpha=0.25, color="#C44E52")
mn = min(y_true.min(), y_pred_mean.min())
mx = max(y_true.max(), y_pred_mean.max())
axes[1].plot([mn, mx], [mn, mx], color="black", linestyle="--")
axes[1].set_title("Media condicional vs valor real")
axes[1].set_xlabel("Valor real [°C]")
axes[1].set_ylabel("Predicción media [°C]")
plt.tight_layout()
plt.show()
9. Mirar la distribución condicional para un caso particular#
Uno de los beneficios de una MDN es que podemos inspeccionar la densidad completa p(y|x) y no solamente un valor puntual.
En la siguiente celda elegimos un ejemplo del conjunto de prueba, recuperamos los parámetros de la mezcla y dibujamos la densidad aprendida en función de y.
def mixture_pdf_1d(y_values, logits_pi, mu, sigma):
pi = torch.softmax(logits_pi, dim=-1).cpu().numpy().reshape(-1)
mu = mu.cpu().numpy().reshape(-1)
sigma = sigma.cpu().numpy().reshape(-1)
dens = np.zeros_like(y_values, dtype=np.float64)
norm_const = np.sqrt(2.0 * np.pi)
for peso, media, desv in zip(pi, mu, sigma):
dens += peso * np.exp(-0.5 * ((y_values - media) / desv) ** 2) / (norm_const * desv)
return dens
idx = np.random.choice(len(X_test))
x_example = X_test[idx:idx + 1].to(device)
y_example_real = destandardize(y_test[idx:idx + 1], y_mean, y_std).item()
with torch.no_grad():
logits_pi_ex, mu_ex_scaled, sigma_ex_scaled = model(x_example)
pi_ex = torch.softmax(logits_pi_ex, dim=-1).squeeze(0).cpu().numpy()
mu_ex = destandardize(mu_ex_scaled.squeeze(0).cpu(), y_mean, y_std).numpy()
sigma_ex = (sigma_ex_scaled.squeeze(0).cpu() * y_std).numpy()
mu_ex_t = torch.tensor(mu_ex, dtype=torch.float32).unsqueeze(0)
sigma_ex_t = torch.tensor(sigma_ex, dtype=torch.float32).unsqueeze(0)
logits_ex_t = torch.log(torch.tensor(pi_ex, dtype=torch.float32)).unsqueeze(0)
y_grid = np.linspace(y_true.min() - 5, y_true.max() + 5, 600)
pdf = mixture_pdf_1d(y_grid, logits_ex_t, mu_ex_t, sigma_ex_t)
plt.figure(figsize=(8, 4))
plt.plot(y_grid, pdf, color="#4C72B0", linewidth=2, label="p(y|x) aprendida")
plt.axvline(y_example_real, color="#C44E52", linestyle="--", label="valor real")
plt.axvline((pi_ex[:, None] * mu_ex).sum(), color="#55A868", linestyle=":", label="media de mezcla")
plt.xlabel("Sensación térmica [°C]")
plt.ylabel("Densidad")
plt.title(f"Distribución condicional aprendida para el ejemplo idx={idx}")
plt.legend()
plt.show()
print("Pesos de mezcla:", np.round(pi_ex, 3))
print("Medias de las componentes [°C]:", np.round(mu_ex.ravel(), 3))
print("Desvíos estándar [°C]:", np.round(sigma_ex.ravel(), 3))
print("Valor real [°C]:", round(y_example_real, 3))
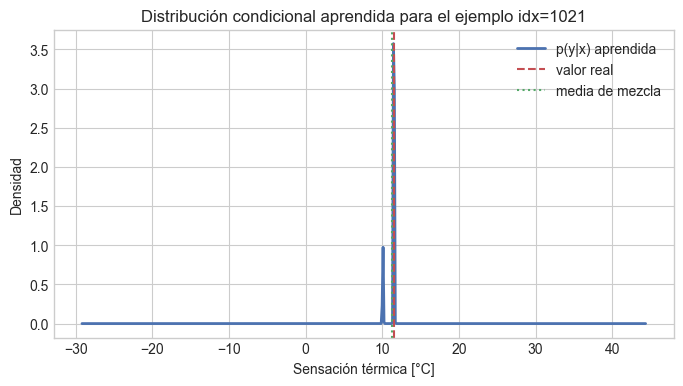
Pesos de mezcla: [0.149 0. 0.001 0.85 0. ]
Medias de las componentes [°C]: [10.076 9.603 9.805 11.512 10.431]
Desvíos estándar [°C]: [0.053 0.097 0.909 0.053 2.672]
Valor real [°C]: 11.533